1.本发明涉及用于车辆的刮水装置的领域。更具体地,本发明涉及一种用于车辆检测系统的刮水装置。
背景技术:
2.如今,越来越多的车辆配备有检测系统,例如停车辅助系统或激光雷达系统,这些系统存在于许多最新的车辆中。这就是为什么关于如何清洁这些检测系统的问题很快就被提出来了。
3.已知使用一些配备有刮水片和刮水臂的刮水装置。由刮水臂承载并由马达驱动的刮水片擦拭检测系统,或者是光学表面或者是布置在检测系统前面的窗口。因此,在雨天或需要清洁的情况下,刮水装置允许检测系统的清晰视野。
4.马达启动刮水臂和刮水片。这种类型的马达通常产生旋转运动,刮水装置必须将马达的旋转运动转换成直线运动。因此,刮水片在需要清洁的表面上来回移动。这种运动转换需要以平稳的方式完成,并且没有任何机械干扰。
技术实现要素:
5.本发明允许通过提供一种用于车辆检测系统的刮水装置来优化这种运动转换,该刮水装置包括刮水片、刮水臂、马达单元和驱动单元,该驱动单元包括承载刮水臂的引导块,该引导块插入引导框架中,该驱动单元包括多个带轮,至少一个驱动带轮由马达单元驱动旋转运动,其特征在于,驱动单元包括由带轮驱动的带,该带根据直线运动移动引导块。
6.刮水臂和刮水片配置成设置成直线运动。刮水片抵靠需要清洁的表面设置,并且直线运动允许根据来回运动擦拭该表面。驱动单元是马达单元和刮水臂之间的中间部件,并且具有在没有机械干涉的情况下将由马达单元发起的旋转运动转换成刮水臂的直线运动的功能。
7.引导块将刮水臂和刮水片设置成直线运动,并且因此也被设置成直线运动。为了将引导块保持在其直线轨迹中,引导框架具有引导引导块的功能。引导框架主要根据平行于需要清洁的表面的方向延伸,并且引导块一直沿着引导框架移动。
8.马达单元使驱动带轮进行旋转运动。这种旋转运动是可逆的,意味着马达单元在顺时针运动和逆时针运动之间旋转,并将这种运动传递给驱动带轮。这种可逆旋转运动可以是机械可逆运动的电可逆运动。这种可逆旋转运动导致引导块的可逆直线运动,这允许刮水片相对于待清洁表面的来回运动。
9.带包含在带有带轮和引导块的驱动单元中。更具体地说,带承载引导块,并且至少由驱动带轮启动。由于带,驱动带轮的旋转运动被转换成引导块的直线运动。带布置到驱动单元中,以便进行这种转换,该转换在没有任何机械干涉的情况下运行。
10.根据本发明的一方面,刮水装置包括两个从动带轮,其布置在引导框架的每个端点上。与直接由马达单元启动的驱动带轮相反,从动带轮由带启动。每个从动带轮具有相同
的尺寸,并且布置在引导框架的每个端点上。换句话说,在每个从动带轮之间的带的一部分沿直线方向延伸,并且引导块附接到带的这一部分,并且从一个从动带轮移动到另一个从动带轮。因此,从动带轮的布局参与了旋转运动到直线运动的转换。
11.根据本发明的一方面,至少一个从动带轮由布置在引导框架上的带轮支撑件承载。例如,带轮支撑件可以模制在引导框架中。带轮支撑件可以由包括孔的两个条板构成,并且由允许在带轮支撑件的两个条板之间建立从动带轮的距离分开。从动带轮包括在其中心的钻孔,杆可以布置成穿过两个条板的每个孔和从动轮的钻孔。杆通过例如胶粘来附接。从动带轮能够绕杆自由转动,并且从动带轮的任何其他运动被带轮支撑件阻挡。
12.根据本发明的一方面,带是齿形带,驱动带轮和从动带轮是与带相互作用的齿形带轮。齿形带和齿形带轮能够避免带相对于任何带轮的任何寄生滑动运动。带轮的齿和带的齿通过互锁连接相互作用。
13.根据本发明的一方面,引导框架包括引导槽,引导块以滑动方式插入引导槽中。引导槽沿着引导框架延伸,并配置成接收引导块。引导槽框住引导块。因此,引导块能做的唯一运动是带设定的直线运动。任何其他运动都被引导槽阻挡。为了将引导块插入引导槽,引导槽可以在端点包括可移除的帽。移除帽以将引导块以滑动方式插入引导槽,并重新定位以关闭引导槽。
14.根据本发明的一方面,引导块包括用于刮水臂的第一附件和用于带的第二附件。如上所述,引导块承载刮水臂,并由带启动。从而引导块同时连接到刮水臂和带,引导块包括两个附件,每个附件适于无机械干涉地连接刮水臂和带。
15.根据本发明的一方面,引导块的第一附件穿过引导框架的开口。引导块的第一个附件允许将刮水臂连接到引导块。因此,引导装置包括开口,其主要在平行于引导块的直线运动的方向上延伸。引导块更具体地说是第一附件部分地从开口中露出,这允许连接刮水臂。因此,即使引导块插入引导槽中,开口也允许引导块承载刮水臂,以便由于刮水片而将表面擦拭干净。
16.根据本发明的一方面,第二附件包括带插入其中的腔,以及包括与带互补的形式的固定盖。引导块的第二附件允许将带连接到引导块。腔模制在引导块上,并配置成接收带。腔的深度对应于带的厚度,以便限制带在腔内的任何运动。当带插入腔时,固定盖封闭腔以将带锁定在引导块中。固定盖可以通过例如螺纹连接或夹紧而附接到引导块。固定盖直接与带接触,并在朝向带的面上包括互补形式。固定盖的互补形式与带的齿互锁。因此,当带被启动时,由于引导块的第二附件,引导块跟随带的运动。
17.根据本发明的一方面,马达单元包括马达和齿轮箱,马达包括根据单向旋转运动移动的马达轴,齿轮箱由马达轴驱动并根据可逆旋转运动驱动驱动带轮。当马达运转时,轴顺时针或逆时针转动。马达轴可以是与齿轮箱互锁的蜗杆。齿轮箱由马达轴驱动,并将马达轴的单向旋转运动转换成可逆旋转运动。这种可逆旋转运动被传递到驱动带轮。
18.根据本发明的一方面,马达旋转轴线垂直于驱动带轮旋转轴线。
19.本发明还包括一种用于车辆的检测系统,该检测系统包括传感器和根据本发明的刮水装置。传感器可以是例如停车辅助设备或激光雷达(“光检测和测距”或“激光检测和测距”的首字母缩写)设备。为了有效地工作,这种传感器需要具有清晰的视野。刮水装置允许保持传感器的效率。
20.根据本发明的一方面,检测系统包括挡风玻璃,其配置为放置在检测系统的传感器前面。换句话说,挡风玻璃位于传感器的视野中。挡风玻璃可以具有多种功能,例如防震,或者,在这种情况下,是挡风玻璃被刮水器装置清洁并允许传感器有清晰的视野。
21.根据本发明的一方面,挡风玻璃包括由刮水片擦拭的清洁区域,清洁区域的长度取决于驱动带轮的直径和驱动带轮的旋转角度。清洁区域可以是挡风玻璃的一部分或整个挡风玻璃。清洁区域的尺寸取决于刮水片的尺寸,更具体地,清洁区域的长度取决于刮水片的直线运动的范围。由引导块承载的刮水片的直线运动范围取决于驱动带轮的旋转角度。驱动带轮的直径也会影响清洁区域的长度。驱动带轮越大,清洁区域的长度越长。清洁区域的长度可以通过以下计算来计算:
[0022][0023]
l是清洁区域的长度,d是驱动带轮的直径,ra是驱动带轮的旋转角度。
附图说明
[0024]
本发明的其他特征、细节和优点可以从下面给出的本发明的说明书中推断出来。附图中示出了各种实施例,其中:
[0025]
图1示出了根据本发明的检测系统的总体视图,
[0026]
图2示出了能够将单向旋转运动转变成可逆旋转运动的马达单元的视图,
[0027]
图3示出了检测系统的俯视图,
[0028]
图4是从动带轮和带轮支撑件之间的连接件的分解图,
[0029]
图5是引导块和带之间的连接件的分解图,
[0030]
图6是根据本发明的刮水装置的引导框架的侧视图。
具体实施方式
[0031]
正交系统lvt代表刮水装置的定向。竖轴v和横轴t对应于定义检测系统的清洁区域的平面的轴,并且纵轴l对应于竖轴v和横轴t的垂直轴。
[0032]
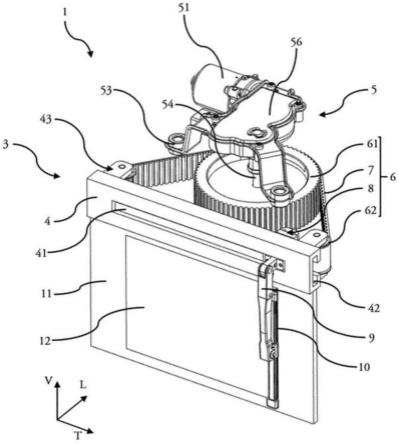
图1示出了检测系统1的概况。检测系统1包括刮水装置3,其具有擦拭检测系统1的挡风玻璃11的功能,更具体的是挡风玻璃11的清洁区域12。如图1所示,清洁区域12可以仅覆盖挡风玻璃11的一部分,或者可以覆盖整个挡风玻璃11。挡风玻璃11放置在图1中看不到的传感器的前面。
[0033]
刮水装置3包括引导框架4。引导框架4界定开口41,该开口41主要根据由竖轴v和横轴t限定的平面延伸,该平面平行于清洁区域12。引导块8部分地从开口41露出且承载刮水臂9,其承载刮水片10。刮水臂9和刮水片10主要根据竖轴v延伸,以便刮水片10与挡风玻璃11的清洁区域12接触。刮水片10的主要尺寸平行于竖轴v,并且等于或大于根据清洁区域12的竖轴v的竖直尺寸,以便在刮水装置3运行时清洁整个清洁区域12。
[0034]
如下所述,引导块8被设置成从开口41的竖直端向另一端平行于横轴t直线运动。引导块8承载刮水臂9和刮水片10,它们也被设置成直线运动。从而刮水片10相对于清洁区域12来回移动以清洁它。开口41根据横轴t具有比清洁区域12的横向尺寸更长的横向尺寸,以便当刮水装置3工作时,刮水片10可以覆盖整个清洁区域12。
[0035]
刮水装置3包括马达单元5,其借助于驱动单元6使引导块8一直沿着开口46直线运动。驱动单元6包括引导块8、带7、驱动带轮61和至少一个从动带轮62。驱动单元6位于马达单元5和刮水臂9之间,并且能够将刮水臂9和刮水片10从由马达单元5发起的旋转运动设置成直线运动。
[0036]
马达单元5包括马达51,该马达51启动旋转运动并将其传递给包含在壳体56的内部容积中的齿轮箱。马达51包括马达轴,其也包含在壳体56的内部容积中。下文将详细描述壳体56的内部容积的内容。齿轮箱轴54从壳体56中露出,并延伸至驱动带轮61。齿轮箱轴54由齿轮箱启动,并使驱动带轮61运动。马达单元5包括固定装置53,以便将马达单元5固定到刮水装置3的任何外部元件。
[0037]
如图1所示的刮水装置3包括两个从动带轮62,它们设置在引导框架4的每一端并附接到带轮支撑件43。关于从动带轮62和带轮支撑件43之间的连接的细节将在下文中描述。驱动带轮61和两个从动带轮62被组织成使得每个带轮的每个中心形成等腰三角形。带7围绕每个带轮布置。带轮是齿形带轮,带7是齿形带。带轮的齿和带7的齿配置成彼此相互作用。因此,当驱动带轮61通过马达单元5启动时,带7和从动带轮62也启动。
[0038]
引导块8布置在引导槽42中,引导槽42锁定引导块8,以便引导块8能够仅沿着平行于横轴t的方向移动。引导块8附接到带7的直线部分上,并位于每个从动带轮62之间。因此,当带7被驱动带轮61启动时,引导块8被带7设置成直线运动。引导块8允许刮水臂9和刮水片10通过开口41被设置成直线运动。这就是刮水片10由于其来回运动而能够如何擦拭清洁区域12。
[0039]
例如,刮水装置3还可以包括用于将清洁液(图1中未示出)喷射到挡风玻璃11的清洁区域12上的装置,以提高清洁性能。用于喷射清洁液的所述装置的至少一部分可以安装在刮水臂9上或其中。
[0040]
图2示出了马达单元5和壳体56的内部容积。马达51通过马达轴55延伸到壳体56中。马达轴55主要根据平行于横轴t的马达旋转轴线500延伸。马达轴55可以是蜗杆,其根据马达旋转轴线500进行单向旋转运动。
[0041]
齿轮箱52示意性地表示在壳体56中,并且与马达轴55接触。齿轮箱52可以包括适于与马达轴55互锁的齿轮。来自马达轴55的运动沿着齿轮箱52传递,直到齿轮箱轴54。齿轮箱轴54将齿轮箱52连接到驱动带轮61。齿轮箱轴54穿过驱动带轮61的中心,并围绕平行于竖轴v的驱动带轮旋转轴线600旋转。
[0042]
齿轮箱52能够将马达轴55的单向运动转换成可逆旋转运动。因此,齿轮箱轴54根据可逆旋转运动而启动,并使驱动带轮61处于相同的运动。驱动带轮61在顺时针运动和逆时针运动之间旋转。马达旋转轴线500和驱动带轮旋转轴线600在它们之间是垂直的。
[0043]
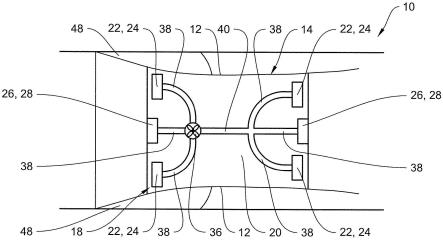
图3示出了根据平行于竖轴的视角的检测系统1的俯视图。图3允许观察传感器2,其位于驱动单元下方和挡风玻璃后面。刮水装置清洁清洁区域,以确保传感器2的清晰视野。
[0044]
清洁区域至少根据横轴t延伸,横轴t由长度100表示。长度100也可以对应于刮水臂9和刮水片10的直线运动的延伸。该长度100取决于驱动带轮61的直径200和驱动带轮的旋转角度300。旋转角度300是对应于位于驱动带轮61的圆周上的点在驱动带轮61的可逆旋转运动的单向序列期间形成的圆弧的角度。因此,长度可以通过以下计算得到:
[0045][0046]
其中,l是清洁区域的长度100,d是驱动带轮61的直径200,ra是驱动带轮61的旋转角度300。因此,刮水装置可以根据清洁区域的长度100进行调整。可以改变驱动带轮61的直径200。驱动带轮61的直径200越大,清洁区域的长度100越长。同样,驱动带轮61的旋转角度300越大,清洁区域的长度100越长。旋转角度300可以通过修改马达单元5的齿轮箱来改变。当然,如果已经进行了上述的任何修改,它可以包括其他修改,例如重新调整引导框架4的尺寸及其开口。
[0047]
图4是分解图,示出了带轮支撑件43以及从动带轮62是如何附接的。带轮支撑件43包括两个条板431,其从引导框架4露出并且主要根据平行于纵轴l的方向延伸。条板431例如可以与整个引导框架4一起模制。每个条板431包括与条板431交叉的条板孔433。条板431的条板孔433彼此面对。两个条板431分开一定距离,该距离允许在两个条板431之间实施从动带轮62。从动带轮62包括钻孔621,其完全穿过从动带轮62并且围绕从动带轮轴线620形成,该从动带轮轴线620是从动带轮62的旋转轴线。当从动带轮62实施在两个条板431之间时,钻孔621面向每个条板孔433。
[0048]
由于穿过钻孔621和两个条板孔433的杆432,从动带轮62附接到带轮支撑件43。此后,杆432可以胶合到每个条板孔433。在这种情况下,从动带轮62能够围绕杆432自由转动,并且任何其他运动都被杆432和条板431阻挡。
[0049]
图5是分解图,示出了带7和刮水臂9在引导块8上的附接。引导块8包括将引导块8连接到刮水臂9的第一附件81,以及将引导块8连接到带7的第二附件82。第一附件81是引导块8的一部分,其从引导框架的开口中露出,以便保持刮水臂9。第一附件81可以借助不干扰引导框架的任何机械附件而连接刮水臂9,例如通过螺纹连接。
[0050]
第二附件82与第一附件相对,并且包括腔83和固定盖84。腔83定向在第一附件81的对面。腔83在尺寸方面配置成接收带7。当带7插入腔83中时,固定盖84通过接触封闭腔83,以便将带7锁定在腔83内。此后,固定盖84可以通过例如螺纹连接而被附接。固定盖84包括互补形式85,其定向在固定盖的与带7接触的面上。互补形式85允许固定盖84和带7之间的互锁。因此,当带7被驱动带轮启动时,由于引导块8的第二附件82和带7之间的互锁,引导块8跟随与带7相同的运动。
[0051]
引导块8包括在第一附件81和第二附件82之间的引导方形件86,并且将在下面详细描述。
[0052]
图6是插入引导框架4中的引导块8的侧视图。侧视图平行于横轴。
[0053]
为了保持引导块8的直线运动,引导块86插入引导框架4中,更具体地说,插入引导槽42中。引导槽42是部分敞开的形式,模制在引导框架4中,该引导框架包围引导方形件86,以便当引导块8由带7启动时保持引导块8的直线运动。引导槽42阻挡引导块8的任何其他运动,这种运动可能发生在例如车辆的一些摇晃之后。引导块8保持其直线运动,并承载刮水臂9和刮水片10,后者确保其擦拭清洁区域的操作。为了将引导块8插入引导槽42中,引导槽42可以在端点处包括可移除的帽。移除帽以将引导块8以滑动方式插入引导槽42中,并重新定位以关闭引导槽42。引导槽42部分打开,以便由于第二附件82而确保与带7的连接,但继续保持引导方形件86。由于该开口,引导块8的第一附件81可以穿过引导框架4。
[0054]
关于刮水臂9,它可以包括弹簧91,该弹簧是引导块8的第一附件81和刮水臂9之间的第二连接件。弹簧91具有正确地将刮水片10贴靠在清洁区域上的功能,以便正确地擦拭它。
[0055]
从前述内容可以理解,本发明提供了一种具有驱动单元的刮水装置,该驱动单元允许将刮水片设置成抵靠清洁区域进行可逆直线运动,该可逆直线运动始于由马达发起的单向旋转运动。
[0056]
然而,本发明不限于这里描述和示出的装置和配置,并且它还延伸到任何等同的装置或配置以及这些装置的任何技术上可操作的组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。