1.本发明涉及马达的控制技术。
背景技术:
2.已提出了以马达为驱动源的电动缸等机器人(例如专利文献1~3)。在这样的机器人中,也已提出了把马达的控制电路组装入机器人的一部分的方案(例如专利文献3)。在控制马达的旋转方向时,通常需要指示马达的驱动电压和马达的旋转方向的信号电压。在马达的驱动电压与信号电压不同的情况下,plc等上级装置需要多个种类的电源,并且还需要针对每个电压的布线,系统结构有时会变复杂。专利文献4中公开了如下控制装置:具备被选择性输入马达的驱动电压的两个输入端子,判别被输入了驱动电压的输入端子是哪个输入端子以设定马达的旋转方向。
3.现有技术文献
4.专利文献
5.专利文献1:日本特许第4531079号公报
6.专利文献2:日本特开2000-60182号公报
7.专利文献3:日本特许第5268096号公报
8.专利文献4:日本特许第6541827号公报
技术实现要素:
9.本发明所要解决的技术课题
10.在马达的控制中,除了旋转方向之外,还经常要求变更转速。如果另外需要指示切换马达的转速的信号电压,则系统结构有时会变复杂。
11.本发明的目的在于以比较简单的系统结构来使得能够控制马达的旋转方向和转速。
12.用于解决技术课题的技术方案
13.根据本发明,提供一种控制装置,为马达的控制装置,其特征在于具备:
14.第一输入端子及第二输入端子,被输入用于驱动所述马达的直流电压;以及
15.控制单元,控制所述马达,其中,
16.所述控制单元执行以下处理:
17.第一输入确认处理,确认对所述第一输入端子或所述第二输入端子的所述直流电压的最初输入;
18.旋转方向设定处理,当通过所述第一输入确认处理在所述第一输入端子或所述第二输入端子中的一个输入端子确认了所述最初输入时,根据所述直流电压被输入哪个输入端子来设定所述马达的旋转方向;
19.动作处理,使所述马达在通过所述旋转方向设定处理设定的旋转方向以第一转速进行动作;
20.第二输入确认处理,确认对所述第一输入端子或所述第二输入端子中的另一个输入端子的所述直流电压的第二输入;以及
21.速度变更处理,当通过所述第二输入确认处理在所述另一个输入端子确认了所述第二输入时,将所述马达的转速从所述第一转速变更到第二转速。
22.发明效果
23.根据本发明,能够以比较简单的系统结构来控制马达的旋转方向和转速。
附图说明
24.图1为系统结构的说明图。
25.图2为控制装置以及驱动电路的电路模块图。
26.图3为示出控制装置的处理例的流程图。
27.图4为示出控制装置的处理例的流程图。
28.图5为示出控制的处理的进行例的时序图。
29.图6为示出控制的处理的进行例的时序图。
30.图7为搬送装置的说明图。
31.图8为图7的搬送装置的说明图。
32.图9为示出与马达转速的变更有关的信息的例子的图。
33.图10为示出控制装置的处理例的流程图。
34.图11为示出控制的处理的进行例的时序图。
35.图12为示出控制的处理的进行例的时序图。
具体实施方式
36.以下参照附图详细说明实施方式。此外,以下的实施方式并不限制权利要求书的发明,而且在实施方式中说明的特征的组合不一定全部为发明所必需。可以任意组合在实施方式中说明的多个特征中两个以上特征。而且,对相同或同样的结构附加相同的附图标记,省略重复的说明。
37.《第一实施方式》
38.《系统的结构》
39.图1为进行电动缸2的驱动控制的控制系统1的说明图。控制系统1具备:电动缸2、plc(可程序逻辑控制器)3以及远程i/o 4。plc 3经由远程i/o 4进行对电动缸2的控制。在电动缸2内置有后述的控制装置5及驱动电路6,plc 3是控制装置5的上级装置。
40.电动缸2具备:缸筒单元su以及马达单元mu。缸筒单元su具备:框体21a、杆22、滚珠螺母23以及滚珠丝杠轴24。马达单元mu具备:框体21b、马达m、电磁制动器bk、旋转编码器ec、控制装置5以及驱动电路6。框体21a为在d1方向延伸的圆柱体,在其一个端部与马达单元mu的框体21b连结。框体21a和框体21b作为整体构成一个框体。
41.框体21b的一个端部被封闭,布线连接部25被固定于此。布线连接部25例如是可自由装卸地连接有将电动缸2与远程i/o 4连接的布线(例如多芯缆线)的连接器。杆22是被支撑为相对于框体21a能够进退、且利用马达单元mu的马达m的驱动力在箭头d1方向进退的工作部。马达m容纳于框体21b。在本实施方式的情况下,马达m是无刷马达,但也可以是无刷马
达以外的马达。
42.在本实施方式的情况下,马达m对杆22的驱动力的传递机构为滚珠丝杠机构,但也可以是滚珠丝杠机构以外的传递机构。在设于杆22的一端部的后述的孔22a内固定有滚珠螺母23。滚珠螺母23以能够在d1方向滑动、且不能旋转的方式配置于框体21a内。在框体21a内,在d1方向上分离、且隔着滚珠螺母23地设置有止动件21a及21b。通过止动件21a及21b与滚珠螺母23抵接来限制滚珠螺母23的移动。即,滚珠螺母23能够在止动件21a与止动件21b之间在d1方向上滑动。
43.在马达m的输出轴m1连接有滚珠丝杠轴24。输出轴m1与滚珠丝杠轴24被配置为平行且在同轴上,滚珠螺母23啮合于滚珠丝杠轴24的螺纹槽。在杆22的一端部(与进出框体21a的一方相反一侧的端部),在其轴方向形成有避免与滚珠丝杠轴24的干扰的孔22a。孔22a为能够插入滚珠丝杠轴24的有底的孔,包围孔22a的圆筒部22b是包覆滚珠丝杠轴24的护套部。杆22的一端部与滚珠螺母23连接,双方能够一体地移动。
44.当马达m进行驱动时滚珠丝杠轴24就旋转,滚珠螺母23在d1方向上移动,并且杆22移动。根据马达m的旋转方向,杆22在从框体21a向外部突出的方向上移动(有时称为前进动作),或者在容纳到框体21a内的方向上移动(有时称为后退动作)。此时,止动件21a限定杆22的后退动作极限,止动件21b限定杆22的后退动作极限。
45.在框体21b内容纳有电磁制动器bk。电磁制动器bk设置成连接于输出轴m1的末端附近。电磁制动器bk在通电时不会与输出轴m1接触,不会妨碍输出轴m1的旋转(非制动状态),在非通电时(电源切断时)与输出轴m1接触,使输出轴m1的旋转完全停止(制动状态)。马达m及电磁制动器bk被框体21b的支撑部8支撑。
46.在框体21b内,还容纳有控制装置5。在本实施方式的情况下,控制装置5是以未图示的线束与驱动电路6电连接的电路基板。虽然可以用一个电路基板来构成控制装置5和驱动电路6,但通过用多个电路基板来构成,有时会提高配置的自由度。控制装置5被框体21b的支撑部7支撑。
47.控制装置5和驱动电路6被配置为它们的基板面相互平行,并且以在与基板面正交的方向(在本实施方式为d1方向)上相互离开的方式配置。在本实施方式中,框体21b是在d1方向上为细长的结构。通过采用使控制装置5和驱动电路6在d1方向上离开的配置,能够将需要的电子电路零件紧致地容纳于框体21b内。
48.在电动缸2还设置有作为检测器件的限位传感器26a、26b。限位传感器26a、26b例如为机械式开关。限位传感器26a是检测滚珠螺母23到达了抵接于止动件21a的位置的传感器。限位传感器26b是检测滚珠螺母23到达了抵接于止动件21b的位置的传感器。限位传感器26a、26b连接于plc 3,plc 3能够检测滚珠螺母23的位置,换言之,确认电动缸2的工作。
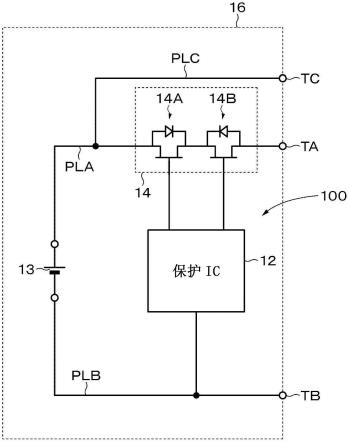
49.参照图2对控制装置5及驱动电路6的结构进行说明。该图为控制装置5及驱动电路6的电路模块图。控制装置5具备与布线连接部25连接的端子5a~5d。因此,电动缸2与远程i/o 4之间的布线包括这些端子5a~5d的数目的布线。远程i/o 4配置在plc 3与未图示的输入输出设备之间,进行输入输出设备与plc 3的输入信号及输出信号的中继。而且,远程i/o 4进行输入输出设备及控制装置5的控制电源的供给。在输入输出设备当中,作为输入设备可以列举各种传感器、被作业者操作的操作开关,作为输出设备可以列举包括电动缸2的各种致动器、异常发生时的警报装置(灯、蜂鸣器)。
50.端子5a及端子5b是作为被输入用于驱动马达m的直流的电压v1的输入端子的第一输入端子及第二输入端子。电压v1是从远程i/o 4作为输出信号被输出的例如dc 24v的正电压。plc 3输出使马达m进行旋转工作的输出信号,并根据作为控制目标的马达m的旋转方向来选择最初输入电压v1的端子(换言之,选择远程i/o 4的输出部)。plc3在使马达m正转(cw)的情况下,通过从与端子5a连接的远程i/o 4的第1输出部输出输出信号来供给电压v1,在使马达m反转(ccw)的情况下,通过从与端子5b连接的远程i/o 4的第2输出部输出输出信号来供给电压v1。而且,在中途改变马达m的转速的情况下,plc 3通过从分别与端子5a及端子5b连接的远程i/o 4的第1输出部及第2输出部双方输出输出信号来将供给电压v1到端子5a及端子5b。
51.具体而言,在中途改变马达m的转速的情况下,plc 3保持持续使电压v1供给到端子5a及端子5b中的任意一方的端子(例如端子5a)的状态,并持续进行将电压v1供给到另一方的输入的端子(例如端子5b)。作为改变马达m的转速的变更的定时,例如是plc 3检测到速度变更的输入信号(例如,未图标的速度变更用传感器的输入、编码器ec的脉冲值的设定值等)的定时。
52.端子5c是被输入用于驱动电磁制动器bk的控制信号(通电时的电压为v1)的输入端子。端子5d是与共用线(gnd)连接的接地端子。在本实施方式中,端子5c及端子5d连接于远程i/o 4的控制信号输出部和接地端子。
53.控制装置5为除了直流电压v1之外还混合存在有直流电压v2及电压v3的电路。在本实施方式的情况下,这些电压的大小关系为v1》v2》v3,电压v2例如为5v,电压v3例如为3.3v。在图2中,电压v1的布线用实线图示,电压v2的布线用单点划线图示,电压v3的布线用双点划线图示。
54.控制装置5还具备:控制电路(控制单元)51、电源电路52、电平变换电路53a及53b、电平变换电路54a及54b、逻辑ic 55、光耦合器56以及输入单元57。另外,控制装置5具备:与驱动电路6之间进行马达m的工作控制用的输入输出信号的通信的通信端子部(端子5h、端子5i、端子5l)以及进行马达m的工作电源的电压供给的马达电压供给部(端子5e、端子5f、端子5g)。另外,控制装置5具备:与外部输入输出设备连接的外部设备输入输出部(端子5c、端子5k、端子5j)。
55.在本实施方式的情况下,控制电路51为在电压v3下工作的通用微机,具备:cpu 51a、存储器51b、i/o接口51c以及pwm信号产生电路51d。cpu 51执行存储于存储器51b的程序,并控制马达m的驱动。存储器51b例如是ram、rom。保存于存储器51b的程序可以通过cdrom等存储介质被分发,由其它计算机从存储介质读取程序而下载到存储器51b。pwm信号产生电路51d是产生用于驱动马达m的pwm信号的电路,例如是可编程计数器/计时器。
56.端子5a经由电平变换电路53a连接于控制电路51所具备的多个输入端口的其中之一,端子5b经由电平变换电路53b连接于控制电路51所具备的多个输入端口的其中另一个。这些输入端口是被输入设定控制电路51的工作用的电源电压、马达m的工作用的电源电压以及马达m的旋转方向、速度变更的信号用的电压的端口。
57.输入到端子5a、5b的电压电平为v1,控制电路51的工作电压电平为v3。电平变换电路53a设置于端子5a与控制电路51之间,电平变换电路53b设置于端子5b与控制电路51之间。电平变换电路53a及53b将电压v1变换成能够输入到控制电路51的电压电平的信号。在
本实施方式的情况下,电平变换电路53a、53b将电压电平从电压v1变换到电压v3。此外,在输入到端子5a、5b的电压电平与控制电路51的工作电压电平相等的情况下,不需要电平变换电路53a、53b。
58.在本实施方式的情况下,电平变换电路53a是使用晶体管作为切换元件的电路,端子5a经由电阻连接于晶体管的基极,对集电极经由电阻施加电压v3。当在端子5a输入0v的情况下,晶体管为off(截止),在控制电路51的对应输入端口输入电压v3。当在端子5a输入电压v1时,晶体管变为on(导通),在控制电路51的对应输入端口输入0v。
59.电平变换电路53b也是同样的结构,当在端子5b输入0v的情况下,晶体管为off,在控制电路51的对应输入端口输入电压v3。当在端子5b输入电压v1时,晶体管变为on,在控制电路51的对应输入端口输入0v。
60.如已说明过的,plc 3与作为控制目标的马达m的旋转方向相应地,最初将电压v1供给到端子5a或端子5b。控制电路51根据电压v1被输入到端子5a和子5b中的哪个端子来设定马达m的旋转方向,从输出端口p1输出表示旋转方向的控制信号。对端子5a或端子5b的电压v1的输入通过持续一定时间而被有效化。
61.逻辑ic 55是在电压v2下工作的ic,包含多种逻辑电路。逻辑ic55将从输出端口p1输出的信号的电压电平从电压v3变换成电压v2而输出到端子5i。虽然这是因为后述的马达控制ic61的工作电压为v2,但也有助于输出电压的稳定化等。
62.电源电路52是根据输入到端子5a或端子5b的电压v1来生成控制装置5的电源电压的电路。在本实施方式的情况下,控制装置5的电源电压为v2及v3,电源电路52具备:生成电压v2的电源电路52a以及生成电压v3的电源电路52b。
63.在电源电路52a,经由防逆流用二极管d1、d2而连接端子5a、5b,将电压v1降压而生成电压v2。电源电路52b将从电源电路52a输出的电压v2降压而生成电压v3。像这样在本实施方式下,如果在端子5a或端子5b的任意端子连续供给电压v1,则能够确保控制装置5的电源电压。
64.另外,当电压v1被输入到端子5a或端子5b中的任意端子时,控制电路51从输出端口p2输出pwm信号。从输出端口p2输出的pwm信号通过逻辑ic 55,电压电平从电压v3变换到电压v2,并输出到端子5h。如已说明的那样,在中途改变马达m的转速的情况下,plc 3对端子5a及端子5b双方供给电压v1。控制电路51通过变更pwm信号产生电路51d的pwm信号的占空比的设定来变更马达m的转速。
65.控制电路51根据对输入单元57的输入结果来进行pwm信号的占空比的设定或变更。输入单元57是能够调整马达m的转速的单元,具备:开关57a,作为驱动开始时的调整马达m的转速的设定单元;以及开关57b,作为转速的变更设定时的调整马达m的转速的设定单元。通过开关57a、57b,能够独立调整杆22的最初的移动速度及之后的移动速度。
66.在本实施方式的情况下,开关57a、57b为被供给电压v3的旋转式开关,能够通过对触点的切换来从多个种类的速度当中选择一个速度。如图1所示,框体21具备使输入单元57向外部露出的开口部21c,作业者能够通过开口部21c,进行开关57a、57b的触点切换。此外,开关57a、57b不限于旋转式开关,也可以是拨码开关等其它开关。
67.此外,本实施方式中,采用切换式开关等物理性输入设备。但是也可以通过在存储器51b设置作为速度设定值的存储区的速度设定存储部来存储速度设定值,由此来进行速
度设定。也可以设置多个该速度设定存储部,进而使得能够进行多个速度设定而进行马达m的速度变更。在该方式的情况下,可以省略输入单元57。另外,也可以并用输入单元57及速度设定存储部。在并用时,例如可以设定基于输入单元57的设定作为基准速度,之后变更为速度设定存储部的速度。
68.经由驱动电路6的端子6l、6m及控制装置5的端子5l、5m对电平变换电路54a、54b输入旋转编码器ec的输出信号(例如具有相位差的信号)。在本实施方式的情况下,旋转编码器ec的工作电压为v2,控制电路51的工作电压电平为v3。电平变换电路54a设置于端子5l与控制电路51之间,电平变换电路54b设置于端子5m与控制电路51之间。电平变换电路54a及54b将电压v2变换为能够输入到控制电路51的电压电平的信号。在本实施方式的情况下,电平变换电路54a、54b将电压电平从电压v2变换为电压v3。此外,在旋转编码器ec的输出信号的电压电平与控制电路51的工作电压电平相等的情况下,不需要电平变换电路54a、54b。
69.在本实施方式的情况下,电平变换电路54a是使用晶体管作为切换元件的电路,在晶体管的基极经由电阻连接有端子5l,对集电极经由电阻施加电压v3。当对端子5l输入0v的情况下,晶体管为off,在控制电路51的对应输入端口输入电压v3。当对端子5l输入电压v2时,晶体管变为on,在控制电路51的对应输入端口输入0v。
70.电平变换电路54b也是同样的结构,当在端子5m输入0v的情况下,晶体管为off,在控制电路51的对应输入端口输入电压v3。当在端子5m输入电压v2时,晶体管变为on,在控制电路51的对应输入端口输入0v。
71.控制电路51能够根据旋转编码器ec的输出信号,判别例如马达m是否正在旋转。
72.控制装置5具备连接有电磁制动器bk(连接于外部输出部的设备)的端子5j、5k。连接于电磁制动器bk的 侧的端子5j经由二极管d3与端子5c连接。电磁制动器bk的驱动电压为v1,在维护等情况下,通过从plc 3输入电压v1到端子5c,能够使电磁制动器bk运转。与电磁制动器bk的一侧连接的端子5k连接于gnd并且经由二极管d4连接于端子5j,抑制电磁制动器bk从on(开机)到off(关机)时的反电动势。
73.在端子5j还能够输入光耦合器56的受光元件56b的输出。光耦合器56具备:发光二极管等发光元件56a以及光电晶体管或光电mosfet等受光元件56b。对发光元件56a施加电压v3,通过控制电路51所具备的端口的高(high)、低(low)的切换,能够控制熄灭、发光。对受光元件56b施加电压v1,当发光元件56a发光时,经由端子5j对电磁制动器bk输入电压v1。在使马达m停止的情况下,控制电路51通过将发光元件56a熄灭来使电磁制动器bk为制动状态并且停止输出pwm信号,使杆22的移动瞬间停止并且保持停止状态。
74.此外,在本实施方式中采用电磁制动器bk作为制动器,但可以替代电磁制动器bk而设置机械式制动器机构。
75.接下来对驱动电路6进行说明。驱动电路6为电压v1及电压v2混合存在的电路。驱动电路6具备端子6a~6c。端子6a~6c分别与控制装置5的端子5e~5g连接,进行电压v1的供给、电压v2的供给及gnd的连接。输入到端子6b的电压v2被供给到旋转编码器ec、马达控制ic61以使它们工作。输入到端子6a的电压v1被供给到fet 62以使fet 62工作。
76.驱动电路6具备端子6e、6d。对端子6e经由端子5i输入表示马达m的旋转方向的控制信号,该控制信号被输入到马达控制ic 61。对端子6d经由端子5h输入pwm信号,pwm信号被输入到马达控制ic 61。
77.驱动电路6具备端子6i~6k。端子6i~6k与马达m的霍尔元件h1~h3连接,来自霍尔元件的信号被输入到马达控制ic 61。此外,从驱动电路6供给电压v2的驱动电压到各霍尔元件h1~h3。驱动电路6具备端子6f~6h。端子6f~6h与马达m的马达绕组连接。
78.马达控制ic 61和fet 62是驱动马达m的电路。马达控制ic 61根据来自控制电路51的表示马达m的旋转方向的控制信号及pwm信号以及来自霍尔元件h1~h3的信号,生成切换马达m的各相的通电的fet 62的切换信号,并输出到fet 62(电压v2)。fet 62利用切换信号进行对各相的电压v1的供给,让马达m旋转。
79.《系统的工作例》
80.接下来对系统1的工作例进行说明。作业者在事前利用开关57a、57b设置马达m的驱动开始时、转速的变更设定时的各转速(换言之,杆22的移动速度)。之后,使plc 3的工作开始。在此,假定plc 3被程序化为在使马达m正转的情况下将电压v1输入到端子5a(端子5b为未输入),在使马达m反转的情况下将电压v1输入到端子5b(端子5a为未输入)。另外,假定当马达m正转时杆22进行前进动作、当马达m反转时杆22进行倒退动作的情况。
81.首先,对使马达m正转的情况进行说明。plc 3供给电压v1到端子5a。具体而言,plc 3的处理器执行存储于pcl 3的存储装置的程序,对远程i/o 4指定输出部,并指示输出信号的输出。响应于其指示,远程i/o 4持续将输出信号输出,由此对与远程i/o 4的输出部连接的端子5a供给电压v1。当电压v1输入到端子5a时,通过电源电路52确保控制装置5所需的电源电压v2和v3,控制电路51的cpu 51a执行存储于存储器51b的程序。
82.另外,cpu 51a取得端子5a、端子5b的各对应输入端口的状态,辨识电压v1被持续输入到端子5a,将马达m的旋转方向设定为正转。cpu 51a取得与开关57a对应的输入端口的状态,设定pwm信号的占空比。cpu 51a使得输出表示马达m的旋转方向的控制信号和pwm信号。另外,开始监视旋转编码器ec的输出信号。进而,在开始输出pwm信号后经过规定时间(例如100毫秒)之后,cpu 51a使发光元件56a发光,将电磁制动器bk设为非制动状态。
83.马达控制ic 61根据来自控制电路51的控制信号和pwm信号,开始驱动马达m。通过马达m的驱动,杆22开始前进动作。在前进动作中途(电压v1被持续供给到端子5a的状态),当通过plc 3对端子5b也供给电压v1时,马达m的转速被变更。cpu 51a取得与开关57b对应的输入端口的状态,设定pwm信号的占空比。由此,马达m的转速(杆22的前进速度)改变。
84.当滚珠螺母23移动直到抵接于止动件21a的位置为止时,马达m不再能够旋转。当旋转编码器ec的输出信号在一定时间没有变化时,cpu 51a视为滚珠螺母23抵接于止动件21a,停止输出控制信号和pwm信号而停止马达m的旋转。另外,将发光元件56a熄灭而将电磁制动器bk设为制动状态,使马达m(输出轴m1)的旋转可靠地停止。
85.滚珠螺母23移动直到抵接于止动件21a的位置为止的情况也被限位传感器26a所检测,plc 3通过限位传感器26a的输出信号而辨识该情况。plc 3在经过规定时间后(例如经过所需的时间后,该所需的时间是,cpu 51a将发光元件56a熄灭而将电磁制动器bk设为制动状态后,经过规定时间后(例如10毫秒后)执行停止pwm输出信号的处理所需的时间),停止对端子5a、5b输入电压v1。
86.接下来对使马达m反转的情况进行说明,与使马达m正转的情况基本相同。
87.plc 3供给电压v1到端子5b。具体而言,plc 3的处理器执行存储于pcl 3的存储装置的程序,对远程i/o 4指定输出部,并指示输出信号的输出。响应于其指示,远程i/o 4持
续将输出信号输出,由此供给电压v1到与远程i/o 4的输出部连接的端子5a。当电压v1输入到端子5b时,通过电源电路52确保控制装置5所需的电源电压v2和v3,控制电路51的cpu 51a执行存储于存储器51b的程序。
88.另外,cpu 51a取得端子5a、端子5b的各对应输入端口的状态,辨识电压v1被持续输入到端子5b,将马达m的旋转方向设定为反转。cpu 51a取得与开关57b对应的输入端口的状态,设定pwm信号的占空比。cpu 51a使得输出表示马达m的旋转方向的控制信号和pwm信号。另外,开始监视旋转编码器ec的输出信号。进而,在开始输出pwm信号后经过规定时间(例如100毫秒)之后,cpu 51a使发光元件56a发光,将电磁制动器bk设为非制动状态。
89.马达控制ic 61根据来自控制电路51的控制信号和pwm信号,开始驱动马达m。通过马达m的驱动,杆22开始后退动作。在后退动作中途(电压v1被持续供给到端子5b的状态),当通过plc 3对端子5a也供给电压v1时,马达m的转速被变更。cpu 51a取得与开关57b对应的输入端口的状态,设定pwm信号的占空比。由此,马达m的转速(杆22的后退速度)改变。
90.当滚珠螺母23移动直到抵接于止动件21b的位置为止时,马达m不再能够旋转。当旋转编码器ec的输出信号在一定时间没有变化时,cpu 51a视为滚珠螺母23抵接于止动件21b,将发光元件56a熄灭而将电磁制动器bk设为制动状态,进而停止输出控制信号和pwm信号而使马达m(输出轴m1)的旋转可靠地停止。
91.滚珠螺母23移动直到抵接于止动件21b的位置为止的情况也被限位传感器26b所检测,plc 3通过限位传感器26b的输出信号来辨识该情况。在经过规定时间后,plc 3停止对端子5b输入电压v1。通过以上,能够反复进行电动缸2的前进动作、后退动作。
92.关于滚珠螺母23的移动停止,除了由于抵接于设在滚珠螺母23的移动方向的止动件21a、21b而停止以外,还列举马达的故障等所致的停止、或障碍物干扰所致的停止。对于这些停止,能够通过监视马达m或滚珠螺母23的工作时间、监视旋转编码器ec的输出信号以及监视限位传感器26a、26b的检测状态的组合来进行检测。
93.《控制装置的处理例》
94.对于上述系统1的工作例中的cpu 51a的处理例,参照图3及图4进行说明。图3及图4为存储于存储器51b的程序的流程图,cpu 51a以规定周期反复执行这些图的处理。图3为端子5a及端子5b的输入确认处理、旋转方向设定处理及转速变更处理。图4为马达m的工作处理。
95.当端子5a或端子5b的至少一方被供给电压v1时,以之为契机,通过电源电路52确保控制装置5所需的电源电压v2和v3,cpu 51a启动。在启动处理之后,cpu 51a开始图3的处理。
96.在s1,取得端子5a、端子5b的各对应输入端口的状态。当各输入端口的状态(以下称为端口输入状态)用端子5a/端子5b来表示时,为on(通电)/off(断电)、off/on、on/on这3种模式中的任意模式。在s2,判定在s1取得的端口输入状态是否与上次图3的处理时取得的端口输入状态相同。上次处理时的端口输入状态保存于存储器51b,在后述的s3被更新。在相同的情况下前进到s5,在不同的情况下前进到s3。在第一次处理时前进到s3。
97.在s3,将在s1取得的端口输入状态的信息保存于存储器51b。如上所述,该信息被用于s2的判定。在s4,重置计时器的值。该计时器是对相同端口输入状态所持续的时间进行计时的计时器。
98.在s5,判定计时器是否为阈值以上。所谓计时器为阈值以上的情况的意思是指,相同的端口输入状态持续了规定时间。在本实施方式下,在相同的端口输入状态以规定时间持续着的情况下,作为确定了端子5a或端子5b的输入来进行处理。由此,能够提高输入信号的抗抖动性、抗噪性。确定内容为保存于存储器51b的端口输入状态。阈值例如是与10毫秒相当的值。在判定为计时器在阈值以上的情况下前进到s7,在判定为小于阈值的情况下前进到s9。在s9,使计时器递增并结束处理。
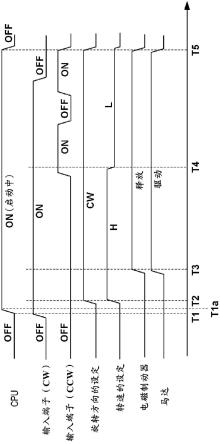
99.在s6,判定马达m的旋转方向是否已经设定完毕。旋转方向的设定信息被保存于存储器51b。在未设定的情况下前进到s7,在设定完毕的情况下前进到s10。在s7,判定在s5确定出的端口输入状态是否为端子5a/端子5b=on/on。即,判定电压v1是否同时输入到端子5a、端子5b。当端子5a/端子5b=on/on时,因为在马达m的旋转方向的设定阶段,无法判别来自plc 3的旋转方向的指示,所以结束处理。如果端子5a/端子5b=on/off、或端子5a/端子5b=off/on时,则前进到s8。
100.在s8,设定马达m的旋转方向。当在s5确定出的端口输入状态为端子5a/端子5b=on/off的情况下,将马达m的旋转方向设定为正转(cw)。当在s5确定出的端口输入状态为端子5a/端子5b=off/on的情况下,将马达m的旋转方向设定为反转(ccw)。当设定了旋转方向时,开始驱动马达m。之后,结束处理。
101.在s10,判定在s5确定出的端口输入状态是否为端子5a/端子5b=on/on。为与s7同样的处理。如果端子5a/端子5b=on/on,则前进到s11,如果不是端子5a/端子5b=on/on,则结束处理(不进行速度变更)。在s11,将马达m的转速从驱动开始时的初始转速(开关57a的设定速度)变更为变更设定时的转速(开关57b的设定速度)。经由以上而结束处理。
102.参照图4。在s21,判定旋转方向是否是从未设定状态而被设定。在为被设定的情况下前进到s22,在尚未被设定的情况下及已经被设定过的情况下前进到s23。在s22,开始驱动马达m。马达m的旋转方向依照设定,而转速被设为驱动开始时的初始转速(开关57a的设定速度。通常转速)。从pwm信号产生电路51d输出pwm信号。电磁制动器bk被设为非制动状态。
103.在s23,判定转速变更是否是从未设定状态而被设定。在为被设定的情况下前进到s24,在尚未被设定的情况下及已经被设定过的情况下前进到s25。在s24,将马达m的转速从初始转速变更为变更设定时的转速。从pwm信号产生电路51d输出的pwm信号的占空比被变更。
104.在s25,判定马达m的停止条件是否已成立。在本实施方式的情况下,当旋转编码器ec的输出信号在一定时间没有变化时,判定为停止条件已成立。在判定为停止条件已成立的情况下,前进到s26,在判定为未成立的情况下结束处理。
105.在s26,停止输出控制信号和pwm信号,停止马达m的旋转。另外,将发光元件56a熄灭而将电磁制动器bk设为制动状态,使马达m(输出轴m1)的旋转可靠地停止。经由以上而处理结束。
106.图5为示出随着在图3及图4说明的控制装置5的处理的进行的、控制电路51的启动状态(cpu 51a的启动状态)、输入端子5a(cw)、输入端子5b(ccw)、马达m的旋转方向的设定、马达m的转速的设定、电磁制动器bk、马达m的变化的例子的时序图。
107.在时间t1,对输入端子5a供给直流电压,由此对控制装置5供给电源(在图的例子
中,输入端子5a为on),cpu 51a启动。对输入端子5a持续供给电压(在图的例子中,输入端子5a的on持续),cpu 51a的启动处理完成(时间t1a)。在时间t2,判定为输入端子5a的on持续超过阈值(规定的设定时间以上)(s5),进而通过对输入端子5a持续供给电压来将马达m的旋转方向设定为正转(cw)(s8)。马达m的旋转方向一旦被设定,直到马达m停止(对输入端子5a、5b的输入都为off)为止都不被变更。
108.关于马达m的转速,初始转速为h,设定变更后的转速为l(h》l),在时间t2的阶段,被设定为初始转速h。初始转速可以是通常速度。转速的变更,也可以是从低速变更为高速。然而,从高速变更为低速,加速/减速期间会变短,能够迅速进行转速的变更。可以是用开关57a能够设定的转速全都是比用开关57b能够设定的转速的任意转速还要高速的速度。另外,初始转速、或设定变更后的转速这双方可以是固定值,也可以是仅其中一方为能够设定的值。例如,可以是初始转速为用开关57a能够设定,设定变更后的转速是比用开关57a能够设定的任意转速低的固定值。
109.在时间t2的阶段,开始驱动马达m,并且开始电磁制动器bk的通电。电磁制动器bk从通电开始到非制动状态为止需要一定时间。在比时间t2稍微延迟的时间t3,电磁制动器bk变为非制动状态,马达m也开始旋转。
110.在时间t4,判定为输入端子5b的on持续超过了阈值(s5),马达m的转速从初始转速h被变更为设定变更后的转速l(s10)。马达m的转速一旦进行了变更,直到马达m停止为止都不被变更。在时间t4以后,虽然有输入端子5a(cw)、输入端子5b(ccw)的on、off改换的时段,但是不会由此而变更马达m的旋转方向或转速。如果对输入端子5a(cw)、输入端子5b(ccw)中任意一方供给直流电压v1,则只要停止条件不成立,就驱动马达m。
111.之后,停止条件成立,在时间t5进行马达m的停止和电磁制动器bk向非通电所致的制动状态的转移。输入端子5a(cw)、输入端子5b(ccw)的输入为off,由此进行cpu 51a的停机(控制装置5的电源off)。
112.图6为示出另一例子的时序图。在时间t11,输入端子5a及5b双方为on,cpu 51a启动。在输入端子5a及5b双方为on的期间,不设定马达m的旋转方向(s7)。之后,在时间t12,输入端子5a为off。在时间t13,判定为输入端子5b的on持续超过了阈值(s5),马达m的旋转方向被设定为反转(ccw)(s8)。如已说明的那样,马达m的旋转方向一旦被设定,直到马达m停止(对输入端子5a、5b的输入都是off)为止都不被变更。
113.在时间t13的阶段,开始驱动马达m,并开始电磁制动器bk的通电。电磁制动器bk从通电开始到非制动状态为止需要一定时间。在比时间t13稍微延迟的时间t14,电磁制动器bk变为非制动状态,在马达m的旋转开始的时间t14,判定为输入端子5a的on持续超过了阈值(s5),马达m的转速从初始转速h被变更为设定变更后的转速l(s10)。如已说明的那样,当马达m的转速一旦进行了变更时,直到马达m停止为止都不被变更。在时间t14以后,虽然有输入端子5a(cw)的on、off改换的时段,但是不会由此而变更马达m的旋转方向或转速。如果对输入端子5a(cw)、输入端子5b(ccw)中任意一方供给直流电压v1,则只要停止条件不成立,就驱动马达m。
114.之后,停止条件成立,在时间t16进行马达m的停止和电磁制动器bk向非通电所致的制动状态的转移。
115.如以上所述,在本实施方式中,将控制装置5的端子5a及5b兼用作控制装置5的工
作电压的输入端子、马达m的驱动电压的输入端子以及马达m的旋转方向的控制信号的输入端子以及马达m的速度变更的控制信号的输入端子。换言之,将驱动电压也用作马达m的旋转方向和转速的控制信号。由此,在plc 3侧只要有生成电压v1的电源便足够。在plc 3与电动缸2之间的驱动电压及控制信号的布线为两根便足够。相比于例如具备驱动电压用布线、正转指示用布线、反转指示用布线以及转速指示用布线的系统,这能够减少两根。
116.因此,能够以比较简单的系统结构来控制马达的旋转方向和转速。特别是在想要在按照24v等单一电压体系的序列控制而工作的系统的一部分导入电动缸2的情况下,能够减少外围设备的变更来导入电动缸2。
117.《第二实施方式》
118.上述的马达单元mu除了电动缸以外,还可以适用于多种驱动装置。图7及图8示出将马达单元mu适用于搬送装置10的驱动单元的例子。图7为搬送装置10的俯视图,图8为在图7的箭头d方向上观察到的搬送装置10的前视图。搬送装置10是包括构成对搬送对象物进行搬送的搬送部的两个滚轮单元11以及配置在该两个滚轮单元11之间的驱动单元18的滚轮输送机。
119.滚轮单元11具备多个滚轮13,各滚轮13的一部分(最上部)从框体12向搬送面侧突出。多个滚轮13构成配置为一列的滚轮列,被一对支撑板14以自由旋转的方式支撑。在各滚轮13安装有从动侧的链轮15及驱动侧的链轮17,另外,在链轮15及17卷绕有链条16。由此,随着驱动侧的链轮17的旋转驱动,经由链条16而从动侧的链轮17被旋转驱动,所有滚轮13一体地旋转。
120.两个滚轮单元11被平行配置,搬送对象物横跨地载置于两列滚轮13的列上。滚轮13旋转从而搬送搬送对象物。
121.驱动单元18具备马达单元mu。马达单元mu具备:框体180、被容纳于框体180的马达m、旋转编码器ec、电磁制动器bk、减速器184、控制装置5、驱动电路6、驱动轴181、带轮(pulley)182及185以及皮带183。
122.本实施方式的马达m、旋转编码器ec、电磁制动器bk、控制装置5及驱动电路6与第一实施方式的马达m、旋转编码器ec、电磁制动器bk、控制装置5及驱动电路6是同样的。在本实施方式中,马达m的输出轴m1替代滚珠丝杠轴24而与减速器184连结。马达m、驱动电路6、旋转编码器ec、电磁制动器bk及减速器184一体地连结。
123.框体180包括:成为其底部的基底板180a以及在基底板180a上立设的支撑部180b、180c。控制装置5被支撑部180b支撑。减速器184被支撑部180c支撑,因此,马达m、驱动电路6、旋转编码器ec、电磁制动器bk隔着减速器184被支撑部18c支撑。
124.驱动轴181连结于两个滚轮单元11中的驱动侧的各链轮17。在驱动轴181的中途部位安装有带轮(齿形带轮)182。另外,在减速器184的输出轴安装有带轮(齿形带轮)185。在带轮182和带轮185卷绕有齿形皮带183。当驱动马达m时,从减速器184输出其旋转力,经由带轮185、齿形皮带183及带轮182传递到驱动轴181。由此,驱动轴181旋转,各滚轮单元11的各滚轮13旋转。
125.在本实施方式中,控制装置5也能够执行与图3、图4示出的流程图同样的处理。通过该处理,能够控制搬送装置10的搬送方向(马达m的旋转方向)、搬送装置10的搬送速度(马达m的转速)。
126.《第三实施方式》
127.在第一实施方式中,将马达m的转速设为能够在两个种类的速度之间进行切换,但也可以是在3个种类以上的速度之间进行切换。在本实施方式中,根据端口输入状态即端子5a/端子5b=on/on的状态的累积时间(的长度)来变更马达m的转速。
128.图9示出与马达m的转速的变更有关的信息的例子。该信息例如作为设定信息被保存于存储器51b。马达m的速度的第1次的变更条件是在端子5a/端子5b=on/on的状态(在端子5a及端子5b双方被输入了直流电压的状态)下持续的累积时间到达100毫秒,变更后的马达m的速度为mv1。在第一实施方式中,当设定了马达m的旋转方向时(s8),马达m以初始转速(通常速度。以下设为mv0)开始旋转。之后,端口输入状态变为端子5a/端子5b=on/on,当在该状态下持续的累积时间到达100毫秒时,马达m的转速被变更为mv1。
129.同样地,马达m的速度的第2次的变更条件是在端子5a/端子5b=on/on的状态下持续的累积时间到达200毫秒。当该条件成立时,马达m的转速从mv1变更到mv2。以下是同样的。在本实施方式的情况下,由变更条件规定的累积时间规定了变更源的转速的最小持续累积时间。
130.在本实施方式的情况下,马达m的速度的关系为初始转速》mv1》mv2》mv3
……
,每次变更都被减速。但也可以设定每次变更都被加速,也可以设定每次变更进行减速或加速中任意一个。
131.图10为存储于存储器51b的程序的流程图,示出cpu 51a所执行的速度变更处理的例子。该图的处理为替代第一实施方式的图3的s10及s11的处理。
132.在s31,判定马达m的当前的转速设定是否为初始转速mv0,在为初始转速mv0的情况下前进到s32,在不是的情况(为mv1等的情况)下前进到s33。在s32,对于作为马达m的转速的变更条件的累积时间和变更后的速度,设定作为第1次的变更条件的累积时间和速度(在图9的例子中为100毫秒、mv1)。
133.在s33,判定端口输入状态是否为端子5a/端子5b=on/on,在端子5a/端子5b=on/on的情况下前进到s34,在不是的情况(on/off、off/on、off/off)下结束处理。
134.在s34,使累积时间计数器的计数值(累积时间)递增。累积时间计数器是指对用于判定变更条件的成立的计数值(累积时间)进行计数的计数器。在s35,判定累积时间计数器的计数值是否为设定为阈值的计数值以上。在此的设定为阈值的计数值是作为在s32(或后述的s37)设定的变更条件的计数值。在判定为计数值为设定为阈值的计数值以上的情况下前进到s36,在不是的情况下结束处理。
135.在s36,将马达m的转速变更为在s32(或后述的s37)作为变更后的速度而设定的速度。在s37,更新作为马达m的转速的变更条件的计数值和变更后的速度。例如,当在s36进行了第1次变更的情况下,对被设定为第2次的变更条件的计数值和速度(在图9的例子中为200毫秒,mv2)进行设定。另外,例如,在s36进行了第2次变更的情况下,对被设定为第3次的变更条件的计数值和速度(在图9的例子中为300毫秒,mv3)进行设定。经由以上而处理结束。
136.图11为示出随着在图10说明的控制装置5的处理的进行的、输入端子5a(cw)、输入端子5b(ccw)以及马达m的转速的设定的变化的例子的时序图。
137.在时间t11供给直流电压到输入端子5a,由此对控制装置5供给电源(在图的例子
中,输入端子5a为on),cpu 51a启动。在时间t12,判定为输入端子5a的on持续超过被设定为阈值的计数值(规定的设定时间以上),马达m的旋转方向正转,以初始转速mv0驱动马达m。
138.在时间t13,直流电压被供给到输入端子5b,输入端子5a、5b都为on。在时间t14,端子5a/端子5b=on/on的状态持续了规定时间(在图9的例子中为100毫秒),马达m的转速被变更为mv1(第1次变更)。
139.在时间t15,端子5a/端子5b=on/on的状态持续了规定时间(在图9的例子中为200毫秒),马达m的转速被变更为mv2(第2次变更)。在时间t16,端子5a/端子5b=on/on的状态了持续规定时间(在图9的例子中为300毫秒),马达m的转速被变更为mv3(第3次变更)。
140.之后,输入端子5a(cw)、输入端子5b(ccw)的输入都变为off,在时间t17进行马达m的停止。
141.累积时间计数器的计数值(累积时间)在端子5a/端子5b=on/on的情况(端子5a及端子5b双方被输入了直流电压的情况)下持续递增(s33、s34),在端子5a/端子5b=on/off的情况或端子5a/端子5b=off/on的情况(端子5a及端子5b中的任意一方被输入直流电压,端子5a及端子5b中的另一方不被输入直流电压的情况)下停止递增。在累积时间计数器的计数值(累积时间)的递增停止的期间,维持当前的转速设定。图12为示出随着在图10说明的控制装置5的处理的进行的、输入端子5a(cw)、输入端子5b(ccw)以及马达m的转速的设定的变化的另一个例子的时序图。
142.在时间t21供给直流电压到输入端子5a,由此对控制装置5供给电源(在图的例子中,输入端子5a为on),cpu 51a启动。在时间t22,判定为输入端子5a的on持续超过被设定为阈值的计数值(规定的设定时间以上),马达m的旋转方向正转,以初始转速mv0驱动马达m。
143.在时间t23,直流电压被供给到输入端子5b,输入端子5a、5b都为on。在时间t24,端子5a/端子5b=on/on的状态持续了规定时间(在图9的例子中为100毫秒),马达m的转速被变更为mv1(第1次变更)。
144.在时间t25,端子5a/端子5b=on/on的状态持续了规定时间(在图9的例子中为200毫秒),马达m的转速被变更为mv2(第2次变更)。在时间t26,输入端子5b(ccw)的输入变为off,停止累积时间计数器的计数值(累积时间)的递增。在时间t27,输入端子5b(ccw)的输入再次变为on,重新开始累积时间计数器的计数值(累积时间)的递增。在时间t28,端子5a/端子5b=on/on的状态按照累积时间到达规定时间(在图9的例子中为300毫秒),马达m的转速被变更为mv3(第3次变更)。
145.之后,输入端子5a(cw)、输入端子5b(ccw)的输入都为off,在时间t29进行马达m的停止。
146.以上对发明的实施方式进行了说明,但是发明并不限于上述的实施方式,在发明主旨的范围内能够进行多种变形、变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。