技术特征:
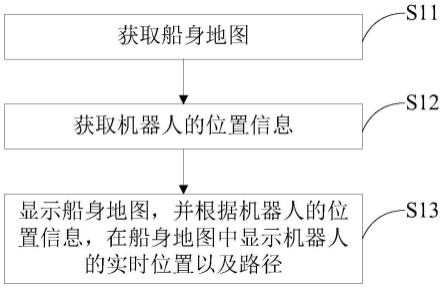
1.一种机器人的控制方法,其特征在于,所述机器人用于对船身进行检测或清扫,所述方法包括:获取船身地图;以及获取机器人的位置信息;显示所述船身地图,并根据所述机器人的位置信息,在所述船身地图中显示所述机器人的实时位置以及路径。2.根据权利要求1所述的方法,其特征在于,所述显示所述船身地图,包括:显示第一按钮和第二按钮,所述第一按钮对应所述船身地图的侧面视图,所述第二按钮对应所述船身地图的底视图;默认显示所述侧面视图,以及响应于对所述第二按钮的点击指令,显示所述底视图;或默认显示所述底视图,以及响应于对所述第一按钮的点击指令,显示所述侧面视图。3.根据权利要求2所述的方法,其特征在于,所述方法还包括:在所述船身地图上显示对应的船身尺寸参数和机器人控制参数;其中,所述船身尺寸参数包括船身部件的宽度参数和高度参数,所述机器人控制参数包括机器人控制模式、机器人坐标参数和机器人工作区域控制。4.根据权利要求1所述的方法,其特征在于,所述方法还包括:获取所述机器人的深度信息;显示所述机器人的深度信息;其中,所述深度信号包括吃水深度、水线更新、深度传感器数据和作业高度中的至少一个。5.根据权利要求1所述的方法,其特征在于,所述方法还包括:获取所述机器人的姿态信息;显示所述机器人的姿态信息;其中,所述姿态信息包括横滚角、俯仰角和偏航角中的至少一个。6.根据权利要求1所述的方法,其特征在于,所述方法还包括:获取所述机器人的控制信息;显示所述机器人的控制信息;其中,所述控制信息包括主控温度、环境温度、电压参数、电流参数、功率参数和爬行速度中的至少一个。7.根据权利要求1所述的方法,其特征在于,所述清扫机器人上设置有图像采集单元;所述方法还包括:获取所述图像采集单元采集的图像信息;显示所述图像信息。
8.根据权利要求1所述的方法,其特征在于,所述方法还包括:显示机器人控制界面;其中,所述机器人控制界面包括船舷设置、速度设置、水线设置和速度微控中的至少一个;响应于基于所述机器人控制界面的操作,产生对应的控制指令,并将所述控制指令发送给所述机器人以控制所述机器人的工作。9.一种机器人控制设备,其特征在于,所述机器人控制设备包括处理器和存储器,所述存储器用于存储程序数据,所述处理器用于执行所述程序数据以实现如权利要求1-8任一项所述的方法。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有程序数据,所述程序数据在被处理器执行时,用以实现如权利要求1-8任一项所述的方法。
技术总结
本申请公开了一种机器人的控制方法、控制设备以及存储介质,该机器人的控制方法包括:获取船身地图;以及获取机器人的位置信息;显示船身地图,并根据机器人的位置信息,在船身地图中显示机器人的实时位置以及路径。通过上述方式,能够显示机器人的实时情况,便于对机器人进行控制。器人进行控制。器人进行控制。
技术研发人员:陈思颖
受保护的技术使用者:深圳纳百信息技术有限公司
技术研发日:2022.06.27
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。