1.本发明涉及垃圾分拣技术领域,特别涉及一种智能垃圾分拣装置。
背景技术:
2.多种类别垃圾的混合倾倒导致大量可回收垃圾无法回收或回收困难,由于不同的垃圾混合在一起,从成堆垃圾中识别出可回收垃圾并分类回收十分困难。
3.目前在现有技术中,除了人工分拣垃圾外,还发展出了机器筛选并分类垃圾的技术。这类技术中,有如公开号为cn114377840a的中国专利公开的一种生活垃圾分拣装置,其通过机械方式对垃圾进行分类筛选,虽然筛选效率高,但对垃圾种类的分类效果较差,无法实现精准的垃圾分拣。又如公开号为cn113275256a的中国专利公开的一种基于视觉识别系统的可回收垃圾智能分拣装置,虽然提出了通过机器视觉识别垃圾并分拣垃圾的技术,但是其结构复杂,且垃圾容易堆叠在一起导致机器视觉无法识别,而且当垃圾种类较多时,对处理器的算力要求较高,不适合整体装置的小型化以及低成本化。
技术实现要素:
4.基于上述原因,本发明提供了一种智能垃圾分拣装置,其优点是通过机器视觉识别出可回收垃圾并自动分拣,且对处理器算力要求不高,整体结构简洁,有利于自动对垃圾进行高效分拣。
5.本发明的技术方案如下:一种智能垃圾分拣装置,其特征在于,包括:振动筛,用于将垃圾分散;分拣输送带,设置在振动筛后端,接收振动筛上落下的垃圾并对垃圾进行输送;金属垃圾分拣装置,包括至少一个电磁吸盘和至少一个金属垃圾回收箱,所述电磁吸盘受控的在分拣输送带以及金属垃圾回收箱之间往复移动;工业相机,设置在分拣输送带的上方,用于采集分拣输送带上垃圾的图像信息;至少两个机械臂,其中一个机械臂的末端设置负压吸盘,另一个机械臂的末端设置夹爪,两个机械臂设置在分拣输送带旁用于受控的拾取分拣输送带上的垃圾;至少一个垃圾分类箱,用于盛装机械臂拾取的垃圾;一个上位机,用于接收工业相机采集到的图像信息,分析上述图像信息,识别出垃圾种类并向机械臂、负压吸盘以及夹爪发送控制信号。
6.本发明进一步设置为,所述工业相机设置在所述金属垃圾分拣装置的后端。
7.本发明进一步设置为,所述电磁吸盘设有两组,两组电磁吸盘受控交替的移动至分拣输送带的上方。
8.本发明进一步设置为,所述金属垃圾分拣装置还包括横跨在分拣输送带上方的第一横梁,第一横梁上滑动连接有第一滑座,第一滑座受控在第一横梁上移动,第一滑座上固定连接有安装板,两个电磁吸盘均安装在所述安装板上。
9.本发明进一步设置为,所述第一滑座由丝杠机构驱动。
10.本发明进一步设置为,还包括横跨在分拣输送带上方的第二横梁,第二横梁上滑动连接有第二滑座,第二滑座受控在第二横梁上移动,所述工业相机固定在第二滑座上。
11.本发明进一步设置为,所述第二滑座由丝杠机构驱动。
12.本发明进一步设置为,在所述分拣输送带的两侧设有挡板。
13.本发明进一步设置为,所述挡板上设有底部向分拣输送带倾斜的斜板。
14.综上所述,本发明的有益效果有:1.本发明通过机器视觉对可回收垃圾进行识别,并通过机械臂对可回收垃圾进行拾取,整个过程无需人力参与,由机器自动实现,达到智能分拣垃圾的效果;2.本发明设置至少两个机械臂,用来安装至少一个夹爪和至少一个负压吸盘,可实现对不同类别垃圾的识别,减少识别出可回收垃圾而无法拾取的情况;3.本发明设置振动筛对垃圾进行分散,使得垃圾在进入分拣输送带上后保持分散的状态,垃圾之间不易有堆叠情况,有利于机器的准确识别不遗漏;4.本发明通过金属垃圾分拣装置先对垃圾进行筛选,筛选出其中的金属垃圾,从而减少了后续继续分拣金属垃圾的压力,减小了处理器的处理压力。
附图说明
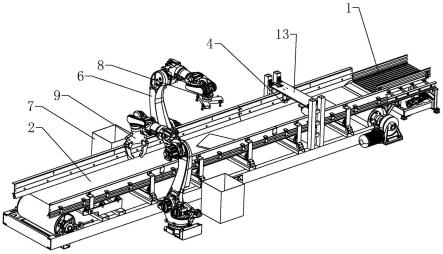
15.图1是本发明的整体结构示意图;图2是本发明的侧面角度示意图;图3是本发明的俯视视角示意图;图4是本发明中体现金属垃圾分拣装置结构的局部示意图;图5是本发明中体现工业相机安装方式的局部示意图;图6是本发明中体现斜板结构的局部示意图。
16.图中,1、振动筛;2、分拣输送带;3、金属垃圾分拣装置;4、工业相机;5、电磁吸盘;6、机械臂;7、垃圾分类箱;8、负压吸盘;9、夹爪;10、第一横梁;11、第一滑座;12、安装板;13、第二横梁;14、第二滑座;15、挡板;16、斜板。
具体实施方式
17.下面结合附图详细说明本发明的具体实施方式。
18.实施例:参考图1-6,一种智能垃圾分拣装置,包括:振动筛1,用于将垃圾分散,振动筛1的选择要求为:选择筛选平面为矩形的振动筛1,其筛选平面向末端倾斜;分拣输送带2,设置在振动筛1后端,接收振动筛1上落下的垃圾并对垃圾进行输送,从振动筛1上落下的垃圾可直接落在分拣输送带2上;金属垃圾分拣装置3,包括至少一个电磁吸盘5和至少一个金属垃圾回收箱,所述电磁吸盘5受控的在分拣输送带2以及金属垃圾回收箱之间往复移动;工业相机4,设置在分拣输送带2的上方,用于采集分拣输送带2上垃圾的图像信息;至少两个机械臂6,其中一个机械臂6的末端设置负压吸盘8,另一个机械臂6的末
端设置夹爪9,两个机械臂6设置在分拣输送带2旁用于受控的拾取分拣输送带2上的垃圾;至少一个垃圾分类箱7,用于盛装机械臂6拾取的垃圾;一个上位机,用于接收工业相机4采集到的图像信息,分析上述图像信息,识别出垃圾种类并向机械臂6、负压吸盘8以及夹爪9发送控制信号。
19.考虑到金属垃圾大多可回收,而不用识别其大小和类型,将所述工业相机4设置在所述金属垃圾分拣装置3的后端,金属垃圾分拣装置3在前端即将大多数的金属垃圾分拣出来,可以有效减小后端垃圾识别的压力。
20.所述电磁吸盘5设有两组,两组电磁吸盘5受控交替的移动至分拣输送带2的上方,以减少金属垃圾的漏选。
21.所述金属垃圾分拣装置3还包括横跨在分拣输送带2上方的第一横梁10,第一横梁10上滑动连接有第一滑座11,第一滑座11受控在第一横梁10上移动,第一滑座11上固定连接有安装板12,两个电磁吸盘5均安装在所述安装板12上。所述第一滑座11由丝杠机构驱动。通过控制第一滑座11在第一横梁10上往复移动,可以带动两个电磁吸盘5往复周期性移动。电磁吸盘5选择圆形的电磁吸盘5,其直径不小于分拣输送带2宽度的80%,两个电磁吸盘5可以依次经过分拣输送带2的上方,当电磁吸盘5移出分拣输送带2时,控制电磁吸盘5断电,电磁吸盘5上吸附的垃圾可以落入在金属垃圾回收箱回收。在分拣输送带2的两侧分别设有一个金属垃圾回收箱,以用于分别接收两个电磁吸盘5吸附的金属垃圾。
22.电磁吸盘5距离分拣输送带2的高度应当不高于20cm,以保证能够有效吸附金属垃圾,同时应当不低于10cm,以不阻碍其他垃圾的输送。
23.还包括横跨在分拣输送带2上方的第二横梁13,第二横梁13上滑动连接有第二滑座14,第二滑座14受控在第二横梁13上移动,所述工业相机4固定在第二滑座14上,所述第二滑座14由丝杠机构驱动。通过控制第二滑座14在第二横梁13上的往复移动,可以实现工业相机4在分拣输送带2上方的移动,有利于工业相机4全面采集到分拣输送带2上垃圾的图像信息,可以通过一台工业相机4即可实现对全部垃圾的图像信息采集。
24.在所述分拣输送带2的两侧设有挡板15,挡板15对垃圾进行约束,避免垃圾掉落。所述挡板15上设有底部向分拣输送带2倾斜的斜板16。斜板16可以将分拣输送带2上的垃圾与挡板15隔开一定间距,从而放置因挡板15遮挡而造成一些死角,这些死角可能会导致工业相机4无法拍摄到部分垃圾以及机械臂6无法拾取到一些垃圾。
25.第一滑座11和第二滑座14的移动均为周期性移动,由事先录入在上位机上的程序实现。电磁吸盘5的通电与断电也是周期性的,同样由事先录入在上位机上的程序实现。本实施例中,负压吸盘8和夹爪9均为气动,机械臂6的移动、负压吸盘8继电器的通断电以及夹爪9继电器的通断电由上位机发送的控制信号进行控制,该控制信号取决于上位机对工业相机4采集到的图像信息的处理结果。
26.说明书中未提及的技术均为现有技术。
27.以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。