衬底传送装置、物品传送装置和衬底传送方法
1.相关申请的交叉引用
2.本技术要求于2021年2月15日在韩国知识产权局提交的韩国专利申请no.10-2021-0019621的优先权,该申请的公开以引用方式全文并入本文中。
技术领域
3.本发明构思涉及一种衬底传送装置和一种衬底传送方法。
背景技术:
4.一般而言,可通过在衬底(诸如硅晶圆或玻璃衬底)上重复执行一系列制造工艺来制造半导体或显示装置。例如,可选择性地和/或重复地执行诸如沉积、光刻、氧化、离子注入和清洁的制造工艺,以在衬底上形成电路图案。
5.此类制造工艺可在例如执行污染控制方法的清洁室中执行。通过将衬底提供给执行该工艺的工艺设施或通过从该工艺设施取出衬底来执行制造工艺之间的衬底传送。通常,包含多个衬底的载体(例如,前开口统一吊舱(foup)、前开口装运箱(fosb)等)可用于制造工艺之间的衬底传送。此类载体通常可通过高架提升运输机(oht)进行传送。通常,高架提升运输机在工艺处理之前传送包含衬底的载体,将载体装载在空的存储结构上,从存储结构中拾取包含经过工艺处理的衬底的载体,并将载体运输到外部。
6.通常,诸如oht装置的吊顶行进传送装置可包括安装在清洁室的顶部上的行进轨道、以及配置为在行进轨道上移动的行进单元。用于运输待传送的对象的提升单元可安装在行进单元的下部上。
技术实现要素:
7.根据本发明构思的示例性实施例,一种衬底传送装置包括:行进单元,其包括在轨道上行进以在第一方向上传送衬底的行进轮;轨道单元,其包括轨道和在与第一方向不同的第二方向上从轨道突出的轨道突起;以及传感器单元,其包括第一传感器和第二传感器,其中,第一传感器感测行进单元,并且第二传感器感测轨道突起,其中,第一传感器和第二传感器基于第一方向沿着轨道放置在彼此相同的位置处。
8.根据本发明构思的示例性实施例,一种物品传送装置包括:行进单元,其包括在第一方向上在轨道上行进的行进轮;轨道单元,其包括轨道和在与第一方向不同的第二方向上从轨道突出的轨道突起;以及传感器单元,其包括第一传感器和第二传感器,其中,第一传感器感测行进单元,并且第二传感器感测轨道突起,其中,行进轮被配置为在轨道上行进至轨道突起,使得行进轮对应于轨道突起。
9.根据本发明构思的示例性实施例,一种衬底传送方法包括:通过识别部件检测提升单元的进入,其中,提升单元连接至行进单元,该行进单元在轨道上行进,并且包括行进轮,其中,轨道在第一方向上延伸;在行进轮在连接了轨道突起的轨道上行进时,通过利用第一传感器测量行进轮的直径;以及在行进轮在轨道上行进时,通过利用第二传感器测量
轨道突起的下降高度,其中,行进轮的直径的测量与轨道突起的下降高度的测量同时执行,其中,第一传感器和第二传感器基于第一方向沿着轨道放置在彼此相同的位置处。
附图说明
10.通过参照附图详细地描述本发明构思的示例性实施例,本发明构思的以上和其它特征将变得更加清楚,在附图中:
11.图1示出了用于解释根据本发明构思的示例性实施例的衬底传送装置的图;
12.图2是图1的衬底传送装置的前视图;
13.图3是根据本发明构思的示例性实施例的衬底传送装置的前视图;
14.图4是图1的衬底传送装置的侧视图;
15.图5是示意性地示出图4的第一传感器测量行进轮的直径的机制的示图;
16.图6是示意性地示出图4的第二传感器测量轨道的下陷高度的机制的示图;以及
17.图7是用于解释根据本发明构思的示例性实施例的衬底传送方法的流程图。
具体实施方式
18.图1示出了用于解释根据本发明构思的示例性实施例的衬底传送装置的图。图2是图1的衬底传送装置的前视图。图3是根据本发明构思的示例性实施例的衬底传送装置的前视图。图4是图1的衬底传送装置的侧视图。
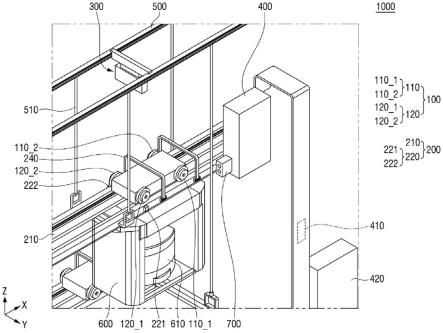
19.参照图1和2,根据本发明构思的示例性实施例的衬底传送装置可包括行进单元100、轨道单元200、传感器单元300、基础面板500和提升单元600。
20.在本发明构思的示例性实施例中,第一方向x是行进单元100行进的方向。第二方向y是与第一方向x不同的方向,并且可以为例如基本上垂直于第一方向x的方向。第三方向z是与第一方向x和第二方向y中的每一个不同的方向,并且可以为例如基本上垂直于第一方向x和第二方向y中的每一个的方向。
21.行进单元100可包括放置在轨道210上的行进轮110和120、其上安装有行进轮110和120的行进体(例如,行进部件)130、以及放置在行进体130上并且在分叉点处支承和引导行进单元100的引导轮140(见图4)。行进体130可包括用于使行进轮110和120旋转的第一驱动单元(包括例如电路和电机)和用于使引导轮140在相对于行进方向的左右方向上移动的第二驱动单元(包括例如电路和电机)。引导轮140可以放置在被配置为在左右方向上可移动的可移动构件上。另外,可以测量引导轮140的磨损量、表面分层、裂纹等的额外传感器可包括在衬底传送装置中。例如,额外传感器可以设置在行进单元100上。
22.行进单元100包括行进轮110和120,行进单元100在轨道210上行进,以传送衬底。行进体130放置在行进轮110和120之间。例如,行进单元100还包括基于第一方向x在轨道210上行进的第一行进轮110和在第一方向x上与第一行进轮110间隔开的第二行进轮120。例如,基于作为行进单元100的移动方向的第一方向x,第一行进轮110可为前轮驱动轮,第二行进轮120可为后轮驱动轮。第一行进轮110包括在与第一方向x不同的第二方向y上彼此间隔开的第1_1行进轮110_1和第1_2行进轮110_2。第二行进轮120包括在与第一方向x不同的第二方向y上彼此间隔开的第2_1行进轮120_1和第2_2行进轮120_2。
23.轨道单元200包括轨道210和在与第一方向x不同的第二方向y上从轨道210突出的
轨道突起220。轨道单元200还包括用于当行进单元100在第一方向x上行进时使行进单元100平衡的轨道连接部240。
24.行进轮110和120以及轨道突起220(例如,221和222)放置为基于第一方向x彼此对应。参照图1,轨道突起220包括放置为对应于第二行进轮120的第2_1行进轮120_1的第一轨道突起221和放置为对应于第二行进轮120的第2_2行进轮120_2的第二轨道突起222。轨道突起220包括放置为对应于第一行进轮110的第1_1行进轮110_1的第一轨道突起221和放置为对应于第一行进轮110的第1_2行进轮110_2的第二轨道突起222。第一轨道突起221和第二轨道突起222放置为在第二方向y上彼此间隔开。例如,第一轨道突起221和第二轨道突起222彼此对准。
25.参照图2,轨道突起220的最上面的表面可放置在行进体130的最上面的表面下方。当轨道突起220的最上面的表面放置为低于行进体130的最上面的表面时,由于通过轨道突起220的高度降低了行进单元100上产生的外力的影响,因此可以更准确地测量行进轮110和120的直径。另外,在该实施例中,轨道突起220的最上面的表面的高度和行进体130的最上面的表面的高度不限于此,并且如图3所示,轨道突起220的最上面的表面可放置在行进部件130的最上面的表面上方。
26.传感器单元300包括感测行进单元100的第一传感器310和感测轨道突起220的第二传感器320。传感器单元300还包括支承第一传感器310和第二传感器320的传感器支承件330。第一传感器310和第二传感器320被连接至基础面板500的传感器支承件330支承,第一传感器310和第二传感器320可以测量到行进轮110和120以及轨道突起220的位移(或者例如,距离)。例如,传感器支承件330可为用于第一传感器310和第二传感器320的壳体。例如,第一传感器310和第二传感器320放置在基础面板500下方。
27.在该实施例中,例如,第一传感器310和第二传感器320可为位移传感器或距离传感器。作为示例,第一传感器310和第二传感器320可为激光传感器。第一传感器310和第二传感器320可以各自包括:投光器(例如,激光器),其朝着对象辐射投射光,该对象反射投射光;以及光接收器,其接收从对象反射的反射光。因此,第一传感器310和第二传感器320中的每一个可以测量从第一传感器310和第二传感器320中的每一个至对象的位移(或者例如,距离)。
28.第一传感器310和第二传感器320基于第一方向x沿着轨道210放置在彼此相同的位置处。由于行进轮110和120以及轨道突起221和222放置为基于第一方向x彼此对应,因此感测行进轮110和120以及轨道突起221和222中的每一个的第一传感器310和第二传感器320也放置在相同的位置处。例如,当第一行进轮110位于轨道突起221和222处时,第一传感器310和第二传感器320可以与第一行进轮110以及轨道突起221和222重叠。例如,当第二行进轮120位于轨道突起221和222处时,第一传感器310和第二传感器320可以与第二行进轮120以及轨道突起221和222重叠。
29.图5是示意性地示出图4的第一传感器测量行进轮的直径的机制的图。图6是示意性地示出图4的第二传感器测量轨道的下陷高度的机制的图。
30.当行进单元100沿着第一方向x移动时,第一传感器310测量第一行进轮110的直径,然后测量第二行进轮120的直径。
31.在在轨道210上行进的第一行进轮110位于轨道210上的对应于轨道突起220的位
置处时的时间点,第一传感器310测量到第一行进轮110的上表面的距离。例如,第一传感器310通过第一行进轮110的上表面和第一传感器310之间的距离b与轨道210的上表面和第一传感器310之间的距离a之间的差来测量行进轮110的直径d。
32.在第一行进轮110基于第一方向x在轨道210上行进时,第二传感器320测量到轨道突起220的上表面的最下面的点的距离。例如,在第一行进轮110位于轨道210上的对应于轨道突起220的位置处时,第二传感器320测量到轨道突起220的上表面的最下面的点的距离。例如,第二传感器320测量轨道突起220的上表面的最下面的点和第二传感器320之间的距离c与在第一行进轮110基于第一方向x在轨道210上行进至对应于轨道突起220的位置之前第二传感器320和轨道突起220的上表面之间的距离e之间的差。因此,第二传感器320测量当第一行进轮110在轨道210上行进时轨道210的下陷高度h(或者例如,下降高度)。下陷高度h是距离c与距离e之间的差。
33.参照图5,在基于第一方向x在轨道210上行进的第二行进轮120位于轨道突起220时,第一传感器310测量到第二行进轮120的上表面的距离。例如,第一传感器310通过第二行进轮120的上表面和第一传感器310之间的距离b与轨道210的上表面和第一传感器310之间的距离a之间的差来测量第二行进轮120的直径d。
34.参照图6,在第二行进轮120基于第一方向x在轨道210上行进时,第二传感器320测量到轨道突起220的上表面的最下面的点的距离。例如,第二传感器320测量轨道突起220的上表面的最下面的点和第二传感器320之间的距离c与在第二行进轮120基于第一方向x在轨道210上行进至对应于轨道突起220的位置之前第二传感器320和轨道突起220的上表面之间的距离e之间的差。因此,第二传感器320测量当第二行进轮120在轨道210上行进时轨道210的下陷高度h。
35.数据控制器400通过将由第二传感器320测量的轨道210的下陷高度h加至由第一传感器310测量的行进轮110和120中的每一个的直径来计算行进轮110和120的直径。例如,数据控制器400可以基于轨道210的下陷高度h调整行进轮110和120中的每一个的直径d,以计算行进轮110和120中的每一个的直径。结果,可以测量衬底传送装置1000中的行进轮110和120的准确直径。此外,因为可以在行进单元100行进的同时测量行进轮110和120的直径,所以可以测量行进轮110和120的直径而不用将行进单元100停止。
36.基础面板500放置在轨道单元200上方。例如,基础面板500可与半导体生产线的顶部相邻安装。基础面板500可以在平行于轨道210的方向上(例如,在第一方向x上)延伸。多个基础面板500可形成为在与第一方向x不同的第二方向y上彼此间隔开。基础面板500和轨道210通过轨道支承件510彼此连接。例如,可存在两个基础面板500,并且每个基础面板500可通过轨道支承件510连接至轨道210。
37.此外,用于调整引导轮140的位置的引导轨道520可以放置在基础面板500的下表面上。引导轨道520可沿着行进单元100的行进方向放置,或者所述多个引导轨道520可在行进方向上按照预定间隔放置。
38.传感器单元300与基础面板500相邻放置。由于传感器单元300放置为更靠近基础面板500而不是轨道单元200,因此第一传感器310可以测量行进轮110和120的直径,并且同时,第二传感器320可以测量轨道210的下陷量。例如,传感器单元300更靠近基础面板500而不是轨道210或轨道突起220。
39.提升单元600放置在轨道210下方并且由行进单元100传送。提升单元600通过连接轴620连接至行进单元100,并且放置在轨道210下方。例如,连接轴620连接至行进体130。在本发明构思的示例性实施例中,提升单元600在对其执行半导体工艺的处理设施之间传送含衬底的载体610。
40.另外,下障碍物检测传感器、前障碍物检测传感器、前距离传感器等可安装在例如行进单元100、基础面板500、轨道单元200和/或提升单元600上。作为示例,下障碍物检测传感器可安装在提升单元600下方,前障碍物检测传感器和前距离传感器可安装在提升单元600的前部上。
41.下障碍物检测传感器可用于确定当装载或卸载待传送的对象时在提升单元600下方是否存在障碍物,前障碍物检测传感器可用于确定在行进单元100正在行进的同时前方是否存在障碍物。另外,前距离传感器可用于测量到位于前方的另一行进单元100的距离。
42.当提升单元600进入轨道210时,识别部件700识别提升单元600。例如,识别部件700可为识别提升单元600的识别信息的相机。作为额外示例,识别部件700可为扫描仪。例如,提升单元600可具有用于识别目的的条形码、识别号等;然而,本发明构思不限于此。
43.图7是用于解释根据本发明构思的示例性实施例的衬底传送方法的流程图。
44.首先,识别部件700和第一传感器310检测提升单元600的进入(s1)。当第一传感器310测量行进轮110和120的直径时,检测到行进单元100的进入,并且识别部件700识别行进单元100的进入,以检测提升单元600的进入。接着,识别部件700识别提升单元600的id(例如,识别信息)(s2)。作为示例,提升单元600的id可按照数字和/或字母的形式印刷在提升单元600的前部上。
45.之后,第一传感器310测量第一行进轮110的直径,并且同时,第二传感器320测量轨道210的下陷量(s3)。例如,当第一行进轮110位于轨道210上的对应于轨道突起220的位置处时,第一传感器310测量到第一行进轮110的上表面的距离。例如,第一传感器310通过第一传感器310和第一行进轮110的上表面之间的距离b与第一传感器310和轨道210的上表面之间的距离a之间的差来测量第一行进轮110的直径d。例如,在第一行进轮110在轨道210上行进至对应于轨道突起220的位置之前,第一传感器310可以测量距离a。
46.在第一行进轮110基于第一方向x在轨道210上行进时,第二传感器320测量到轨道突起220的上表面的最下面的点的距离。例如,第二传感器320测量轨道突起220的上表面的最下面的点和第二传感器320之间的距离c与在第一行进轮110基于第一方向x在轨道210上行进至对应于轨道突起220的位置之前第二传感器320和轨道突起220的上表面之间的距离e之间的差。因此,当第一行进轮110在轨道210上行进时,第二传感器320测量轨道210的下陷高度h。
47.之后,第一传感器310测量第二行进轮120的直径,并且同时,第二传感器320测量轨道210的下陷量(s4)。第一传感器310在基于第一方向x在对应于轨道突起220的位置处测量到第二行进轮120的上表面的距离。例如,第一传感器310通过第一传感器310和第二行进轮120的上表面之间的距离b与第一传感器310和轨道210的上表面之间的距离a之间的差来测量第二行进轮120的直径d。例如,在第二行进轮120在轨道210上行进至对应于轨道突起220的位置之前,第一传感器310可以测量距离a。
48.在第二行进轮120基于第一方向x在轨道210上行进时,第二传感器320测量到轨道
突起220的上表面的最下面的点的距离。例如,第二传感器320测量轨道突起220的上表面的最下面的点和第二传感器320之间的距离c与在第二行进轮120基于第一方向x在轨道210上行进至对应于轨道突起220的位置之前第二传感器320和轨道突起220的上表面之间的距离e之间的差。因此,当第二行进轮120在轨道210上行进时,第二传感器320测量轨道210的下陷高度h。
49.之后,数据控制器400检测提升单元600的通过(s5)。当完成第一传感器310和第二传感器320的测量时,数据控制器400可以检测提升单元600的通过。
50.之后,可通过数据控制器400基于由第二传感器320测量的轨道210的下陷高度h和由第一传感器310测量的行进轮110和120的直径d计算行进轮110和120的直径(例如,最终直径)(s6)。例如,通过数据控制器400将由第二传感器320测量的轨道210的下陷高度h加至由第一传感器310测量的行进轮110和120的直径d,可计算行进轮110和120的直径(s6)。例如,数据控制器400可以基于轨道210的下陷高度h调整行进轮110和120的直径d,以计算行进轮110和120的直径。作为另一示例,下陷高度h可被加至由第一传感器310测量的行进轮110和120的直径d,以计算行进轮110和120的直径。然而,本发明构思不限于此。
51.之后,关于由数据控制器400计算的行进轮110和120的直径的信息通过端口410发送至服务器(s7)。例如,端口410可为遥控端口或者网络端口。数据控制器400连接至电源420,并且由其供电。
52.因此,用户可以在行进单元100行进的同时接收关于行进轮110和120的直径的准确信息。
53.虽然已经参考本发明构思的示例性实施例描述了本发明构思,但本领域的普通技术人员将理解,在不脱离本发明构思的精神和范围的情况下,可以对其进行形式和细节上的各种改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。