一种rgv小车输送系统
技术领域
1.本实用新型涉及轮对运转技术领域,具体涉及一种rgv小车输送系统。
背景技术:
2.轮对作为铁路车辆转向架的主要构件,其主要由转轴,位于转轴两端处的轮盘。在轮对维修、组装过程中,通过需要将轮对吊机或放置在轨道上进行转运。采用吊机转运时,需要在厂房内安装吊机,基础建设成本高,且吊装过程中危险性高,轮对易晃动,而放置在轨道上,通常是采用人工推动轮对的方式进行轮对转运,该工作方式麻烦,人工成本高,且操作时不易控制轮对转向。如何解决上述技术问题,是本领域技术人员致力于研究的事情。
技术实现要素:
3.本实用新型的目的是克服现有技术的不足,提供一种rgv小车输送系统,其操作方便,自动化程度高。
4.为达到上述目的,本实用新型采用的技术方案是:一种rgv小车输送系统,包括十字型输送导轨、rgv小车及轮对,所述输送导轨上的十字口处安装有转盘,所述输送系统包括控制单元、通讯模块、驱动单元、rfid读卡器、rfid标签、光电传感器、编码器及障碍物检测模块,所述rfid标签设置在轮对上,所述驱动单元、rfid读卡器、光电传感器、编码器及障碍物检测模块安装在rgv小车上且与通讯模块电连接,控制单元内存储有各工作区的位置信息,所述轮对上设置有与光电传感器相对的反光条,所述光电传感器有三个,分别为设置在rgv小车前端、中部及后端上的光电传感器ⅰ、光电传感器ⅱ及光电传感器ⅲ,当光电传感器ⅰ或光电传感器ⅲ检测到反光条时,将检测信号通过通讯模块传递给控制单元,由控制单元给驱动单元发送信号,以降低rgv小车的行进速度;当光电传感器ⅱ检测到反光条时,将检测信号通过通讯模块传递给控制单元后,由控制单元给驱动单元发送信号使rgv小车停止运行;所述编码器用于检测rgv小车的移动距离,并将检测的距离信号通过通讯模块传输给控制单元,控制单元根据所检测到的距离信号结合转盘的转向信号来确定rgv小车所在的位置;所述障碍物检测模块用于扫描rgv小车前进过程中的障碍物情况,以获得rgv小车距离障碍物的距离,并将检测信息通过通讯模块传输给控制单元,由控制单元发送信号给驱动单元以调整rgv小车的运行速度。
5.作为一种具体的实施方式,所述输送系统还包括与通讯模块电连接的报警防撞控制单元,所述报警防撞控制单元包括安装在rgv小车上的防撞条及声光报警器,当rgv小车触碰到障碍物时,防撞条将检测信号通过通讯模块传输给控制单元,由控制单元发送信号给驱动单元以使rgv小车停止运行,同时控制单元发送信号给声光报警器,使声光报警器发光并发出报警音。
6.作为一种具体的实施方式,所述通讯模块采用了wifi模块或蓝牙模块。
7.作为一种具体的实施方式,所述输送系统还包括设于rgv小车上的霍尔传感器,各工作区域内设置有与霍尔传感器相对的磁铁。
8.作为一种具体的实施方式,所述输送系统还包括与控制单元连接的触摸显示屏。
9.作为一种具体的实施方式,所述输送系统还包括充电桩以及安装在rgv小车上的充电模块,所述充电模块与通讯模块电连接,当充电模块显示电量不足时,将信号通过通讯模块反馈给控制单元,由控制单元结合所存储的工作区域位置信息发出信号给驱动单元,由驱动单元带动rgv小车行使至充电区。
10.作为一种具体的实施方式,所述充电区设置有插接头,rgv小车上设置有与插接头相匹配的充电接口。
11.作为一种具体的实施方式,所述充电模块包括锂电池组、无线接收模块、接入继电器、插电桩接入检测、无线接收天线,所述充电区设置有无线发射天线及无线发射功率模块,其中,锂电池组与无线接收模块连接,插电桩接入检测与接入继电器相连,接入继电器、无线接收模块与无线接收天线通讯连接。
12.作为一种具体的实施方式,所述障碍物检测模块为安装在rgv小车上的红外线感应器或激光雷达。
13.作为一种具体的实施方式,所述输送导轨包括供轮对行进的第一导轨和供rgv小车行进的第二导轨,所述第二导轨位于第一导轨的内侧。
14.作为一种具体的实施方式,所述rgv小车上设置有用于抵挡在轮对径向外侧部上的拨杆,所述拨杆能够旋转或升降的抵挡在轮对上,所述驱动单元包括用于驱动rgv小车行走的直流电机以及用于驱动拨杆工作的步进电机。
15.由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:本实用新型的rgv小车输送系统,其通过设置设置控制单元、通讯模块、驱动单元、rfid读卡器、rfid标签、光电传感器、编码器及障碍物检测模块,能够实现rgv小车的自动运行,通过设置三个光电传感器,以调整rgv小车的行进速度,进而调整rgv小车与轮对的关系,通过设置编码器来定位rgv小车的位置,通过设置障碍物检测模块,确保rgv小车不会发生碰撞、安全可靠。
附图说明
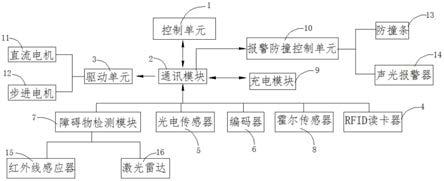
16.附图1为本实用新型所述的rgv小车输送系统的结构框图;
17.附图2为采用本实用新型所述的rgv小车输送系统进行轮对输送的结构示意图;
18.附图3中本实用新型所述的rgv小车输送系统中充电模块采用无线充电的结构框图;
19.其中:1、控制单元;2、通讯模块;3、驱动单元;4、rfid读卡器;5、光电传感器;6、编码器;7、障碍物检测模块;8、霍尔传感器;9、充电模块;10、报警防撞控制单元;11、直流电机;12、步进电机;13、防撞条;14、声光报警器;15、红外线感应器;16、激光雷达;17、锂电池组;18、无线接收模块;19、插电桩接入检测;20、插入继电器;21、无线接收天线;100、第一导轨;200、第二导轨;300、rgv小车;400、轮对;500、转盘。
具体实施方式
20.下面结合附图及具体实施例来对本实用新型的技术方案作进一步的阐述。
21.一种rgv小车输送系统,包括十字型输送导轨、rgv小车300及轮对400,该输送导轨上的十字口处安装有转盘500,参见图2所示,输送系统包括控制单元1、通讯模块2、驱动单
元3、rfid读卡器4、rfid标签、光电传感器5、编码器6及障碍物检测模块7,参见图1所示。
22.这里,rfid标签设置在轮对400上,驱动单元3、rfid读卡器4、光电传感器5、编码器6及障碍物检测模块7安装在rgv小车300上且与通讯模块2电连接,控制单元1内存储有各工作区的位置信息,轮对400上设置有与光电传感器5相对的反光条,光电传感器5有三个,分别为设置在rgv小车300前端、中部及后端上的光电传感器5ⅰ、光电传感器5ⅱ及光电传感器5ⅲ,当光电传感器5ⅰ或光电传感器5ⅲ检测到反光条时,将检测信号通过通讯模块2传递给控制单元1,由控制单元1给驱动单元3发送信号,以降低rgv小车300的行进速度;当光电传感器5ⅱ检测到反光条时,将检测信号通过通讯模块2传递给控制单元1后,由控制单元1给驱动单元3发送信号使rgv小车300停止运行;编码器6用于检测rgv小车300的移动距离,并将检测的距离信号通过通讯模块2传输给控制单元1,控制单元1根据所检测到的距离信号结合转盘500的转向信号来确定rgv小车300所在的位置;障碍物检测模块7用于扫描rgv小车300前进过程中的障碍物情况,以获得rgv小车300距离障碍物的距离,并将检测信息通过通讯模块2传输给控制单元1,由控制单元1发送信号给驱动单元3以调整rgv小车300的运行速度。
23.这里,该输送系统还包括与通讯模块2电连接的报警防撞控制单元101,报警防撞控制单元101包括安装在rgv小车300上的防撞条13及声光报警器14,当rgv小车300触碰到障碍物时,防撞条13将检测信号通过通讯模块2传输给控制单元1,由控制单元1发送信号给驱动单元3以使rgv小车300停止运行,同时控制单元1发送信号给声光报警器14,使声光报警器14发光并发出报警音。
24.本例中,该通讯模块2采用了wifi模块或蓝牙模块。
25.本例中,输送系统还包括设于rgv小车300上的霍尔传感器8,各工作区域内设置有与霍尔传感器8相对的磁铁。通过霍尔传感器8检测到的磁场强度与控制单元1内的设定值进行比较,以确定所处的工作区域,这里,该霍尔传感器8有三个,分别位于rgv小车300的前端、中部及后端上。
26.本例中,该输送系统还包括与控制单元1连接的触摸显示屏。
27.这里,该输送系统还包括充电桩以及安装在rgv小车300上的充电模块9,充电模块9与通讯模块2电连接,当充电模块9显示电量不足时,将信号通过通讯模块2反馈给控制单元1,由控制单元1结合所存储的工作区域位置信息发出信号给驱动单元3,由驱动单元3带动rgv小车300行使至充电区。
28.具体的,可采用人工充电的方式,如在充电区设置有插接头,rgv小车300上设置有与插接头相匹配的充电接口。或者可采用无线充电方式,具体的,该充电模块9包括锂电池组17、无线接收模块18、接入继电器、插电桩接入检测19、无线接收天线21,充电区设置有无线发射天线及无线发射功率模块,其中,锂电池组17与无线接收模块18连接,插电桩接入检测19与接入继电器相连,接入继电器、无线接收模块18与无线接收天线21通讯连接,参见图3所示。
29.本例中,障碍物检测模块7为安装在rgv小车300上的红外线感应器15或激光雷达16。
30.本例中,该输送导轨包括供轮对400行进的第一导轨100和供rgv小车300行进的第二导轨200,第二导轨200位于第一导轨100的内侧。
31.本例中,该rgv小车300上设置有用于抵挡在轮对400径向外侧部上的拨杆,拨杆能够旋转或升降的抵挡在轮对400上,驱动单元3包括用于驱动rgv小车300行走的直流电机11以及用于驱动拨杆工作的步进电机12。
32.采用本实用新型的输送系统,可实现多rgv小车300、多轮对400的工作需求,且自动化程度高,操作方便。
33.轮对400取料时:
34.由控制单元1对照所存储的工作区的位置信息,发送信号给驱动单元3,由直流电机11带动rgv小车300行进至取料区,当光电传感器5ⅰ或光电传感器5ⅲ检测到轮对400上的反光条时,将信号通过通讯模块2传输给控制单元1,由控制单元1发送信号给驱动单元3,减速至设定值,而后当光电传感器5ⅱ检测到轮对400上的反光条时,同样将信号传输给控制单元1后,由控制单元1发送信号给驱动单元3,使直流电机11停止运行,由rgv小车300上的rfid读写器读取轮对400上的rfid标签信息,确认轮对400信息是否符合,如符合进行取料,如不符合重新寻找轮对400。
35.若轮对400信息符合时,控制单元1发送信号给驱动单元3,由步进电机12驱动拨杆工作,以抵挡在轮对400的径向两侧面上。
36.轮对400放料时:
37.由直流电机11带动rgv小车300、轮对400运行,通过控制单元1内所存储的工作区的信息,以及rgv小车300上的编码器6所回传的信息,来确定rgv小车300的位置,进而调整rgv小车300的运动轨迹,通过rgv小车300上的霍尔传感器8感应轮对400存放区的磁铁所发出的磁场强度与设定值相比以确定小车是否到达存放区位置,若相匹配,即停运rgv小车300,步进电机12将拨杆回复到初始位。
38.充电时:
39.当控制单元1接收到充电模块9内的电池电量不足时,对照存储的充电区的位置情况与rgv小车300的所在位置,发送信号给驱动模块,由直流电机11带动rgv小车300运行,至充电区,而后可采用人工充电的方式或有线、无线的充电方式进行充电。
40.上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。