技术特征:
1.一种用于计量连续长形元件(900)的方法,所述方法包括:-沿着第一道(110)以推进方向(100)推进所述连续长形元件(900),以便以馈送速度将所述连续长形元件(900)连续馈送到馈送点(a);-在沿所述第一道(110)的检测点(r)处,连续地光学检测与所述连续长形元件(900)在基本垂直于所述推进方向(100)的平面上的截面(200)有关的几何信息;-基于所述几何信息,连续计算代表所述截面(200)的面积延伸的值;以及-基于代表面积延伸的所述值和在所述馈送点(a)处的所述连续长形元件(900)的馈送流率的参考值,连续调整所述馈送速度。2.根据权利要求1所述的方法,包括基于馈送流率的所述参考值和代表所述截面(200)的面积延伸的所述值之间的比率,连续计算馈送速度的理论值,其中,连续调整所述馈送速度包括将所述馈送速度设置为等于所述理论值,并且其中,所述馈送点(a)位于所述第一道(110)的出口处。3.根据前述权利要求中任一项所述的方法,包括:优选地基于所述馈送速度,计算所述截面(200)从所述检测点(r)到所述馈送点(a)所花费的时间延迟,并且其中,还基于所述时间延迟连续调整所述馈送速度。4.根据前述权利要求中任一项所述的方法,其中,检测所述几何信息包括检测所述截面(200)的轮廓的至少第一部分(11)相对于参考高度(500)的高程轮廓,其中,所述截面(200)的轮廓的所述第一部分(11)属于所述连续长形元件(900)的第一表面(10),其中,轮廓的所述第一部分(11)是连续的部分,并且其中,轮廓的所述第一部分(11)至少延伸轮廓的整个延展的三分之一。5.根据权利要求4所述的方法,其中,仅检测截面的轮廓的所述第一部分(11)的所述高程轮廓,其中,连续计算代表所述截面(200)的面积延伸的所述值包括计算截面(200)的轮廓的第一部分(11)的所述高程轮廓所针对的面积,其中,推进连续长形元件并使得所述连续长形元件的表面与运输元件(5)的表面(501)接触,其中,运输元件(5)的所述表面(501)的高度与所述参考高度(500)相对应。6.根据权利要求4所述的方法,其中,检测所述几何信息包括检测所述截面(200)的轮廓的第二部分相对于相应的参考高度的高程轮廓,其中,所述截面(200)的轮廓的所述第二部分属于所述连续长形元件(900)的第二表面,其中,所述第二表面相对于所述第一表面(10)被布置在所述连续长形元件(900)的基本相反的一侧,其中,连续长形元件(900)在所述检测点(r)处悬浮在空气中,并且其中,确定针对所述截面(200)的轮廓的所述第一部分(11)和第二部分的高程轮廓的相同的参考高度。7.根据权利要求5或6所述的方法,其中,所述截面(200)的轮廓的所述第一部分(11)、以及可能地、所述第二部分基本上沿着所述连续长形元件的整个延伸部、沿着垂直于所述推进方向(100)的方向延展,并且其中,检测所述截面(200)的轮廓的所述第一部分(11)和/或第二部分的高程轮廓包括:-用线性激光束(400)分别照亮轮廓的第一部分(11)和/或第二部分;-获取连续长形元件的表面的矩阵部分的矩阵图像,所述矩阵部分包括轮廓的第一部分(11)和/或第二部分,其中,矩阵图像包括分别由轮廓的第一部分(11)和/或第二部分反射的激光线;
‑
通过对反射的激光线进行三角测量处理,计算所述高程轮廓。8.根据前述权利要求中任一项所述的方法,其中,所述第一道(110)包括包含检测点(r)的检测部分(111),其中,使所述连续长形元件沿所述检测部分(111)受到张力,其中,连续检测所述连续长形元件沿所述检测部分(111)的第一张力,并连续比较检测的所述第一张力与相应的参考张力,其中,基于检测的所述第一张力和所述相应的参考张力之间的所述比较,连续指令第一张紧系统(16),以沿检测部分(111)张紧所述连续长形元件,并且其中,通过在所述检测部分(111)的一端处拉动所述连续长形元件,同时在相对端处制动所述连续长形元件,使所述连续长形元件沿所述检测部分(111)受到张力。9.根据权利要求8所述的方法,其中,使所述检测部分(111)上游的所述连续长形元件受到张力,其中,连续检测所述检测部分(111)上游的所述连续长形元件的第二张力,并将检测的所述第二张力与相应的参考张力相比较,其中,基于检测的所述第二张力和所述相应的参考张力之间的所述比较,连续指令第二张紧系统(21),以张紧所述检测部分(111)上游的所述连续长形元件,其中沿所述检测部分(111)的所述参考张力大于所述检测部分上游的所述参考张力。10.根据前述权利要求中任一项所述的方法,其中,所述第一道(110)包括包含检测点(r)的检测部分(111),其中,所述检测部分(111)与所述第一道(110)重合,其中,连续调整所述馈送速度包括连续指令适合于和/或布置用于将所述连续长形元件直接馈送至所述馈送点(a)的推进装置(2),其中,所述推进装置(2)被布置在所述检测部分(111)的出口处并且构造成用于沿所述检测部分(111)拉动所述连续长形元件。11.根据权利要求1至9中任一项所述的方法,其中,所述第一道(110)包括包含检测点(r)的检测部分(111),以及布置在所述检测部分(111)下游的缓冲部分(112),其中,所述缓冲部分(112)的出口与所述第一道(110)的出口重合,其中,连续调整所述馈送速度包括连续指令布置在所述缓冲部分(112)的出口处并构造成用于沿所述缓冲部分(112)拉动所述连续长形元件的馈送装置(999)。12.根据权利要求11所述的方法,其中,连续检测所述连续长形元件沿所述缓冲部分(112)的张力,并连续比较沿所述缓冲部分(112)检测的所述张力与相应的参考张力,并且其中,基于沿所述缓冲部分(112)检测的张力和相应的参考张力之间的所述比较,连续指令布置在所述检测部分(111)的出口处并且构造成用于沿所述检测部分(111)拉动所述连续长形元件的推进装置(2),并且其中,沿所述检测部分(111)的参考张力大于沿所述缓冲部分(112)的所述参考张力。13.一种用于计量连续长形元件(900)的装置(99),所述装置包括:-推进系统(1),用于沿第一道(110)沿推进方向(100)推进所述连续长形元件(900),以便以馈送速度将所述连续长形元件(900)连续馈送到馈送点(a);-光学检测系统(6),用于沿所述第一道(110)在检测点(r)处连续检测与所述连续长形元件(900)在基本垂直于所述推进方向(100)的平面上的截面(200)有关的几何信息;-与所述推进系统(1)和所述光学检测系统(6)相连的指令和控制单元(26),其中,所述指令和控制单元(26)被编程为:-基于所述几何信息,连续计算代表所述截面(200)的面积延伸的值;-基于代表面积延伸的所述值和在所述馈送点(a)处的所述连续长形元件(900)的馈送
流率的参考值,连续指令所述推进系统(1),以连续调整所述馈送速度。14.根据权利要求13所述的装置(99),其中,所述光学检测系统(6)包括第一光学检测装置(7),所述第一光学检测装置包括具有光轴(300)的矩阵相机(8)和能够发射具有传播轴(401)的线性激光束(400)的线性激光源(9),并且其中,所述光学检测系统(6)被构造成和/或定位为检测所述截面(200)的轮廓的第一部分(11)相对于参考高度(500)的至少一个高程轮廓。15.根据权利要求14所述的装置(99),其中,所述截面(200)的轮廓的所述第一部分(11)属于所述连续长形元件(900)的第一表面(10),其中,所述光轴(300)或所述传播轴(401)基本上垂直于所述连续长形元件(900)的所述第一表面(10),并且其中,矩阵相机(8)的所述光轴(300)穿过连续长形元件的运输元件(5)的表面(501)。16.根据权利要求14或15所述的装置(99),其中,所述光学检测系统(6)包括第二光学检测装置(12),所述第二光学检测装置包括具有相应的光轴(301)的相应的矩阵相机,以及能够发射具有相应传播轴的相应线性激光束(401)的相应线性激光源,其中,所述光学检测系统(6)、优选地所述第二光学检测装置(12),被构造成和/或定位为检测所述截面(200)的轮廓的第二部分的高程轮廓。17.根据权利要求13至16中任一项所述的装置(99),其中,所述第一道(110)包括包含检测点(r)的检测部分(111),其中,所述推进系统(1)包括推进装置(2),所述推进装置构造成用于抓取所述连续长形元件,其中,所述推进装置(2)包括能够由所述指令和控制单元(26)控制的机动辊(3)和基本平行于所述机动辊(3)并与之保持推力的另外的辊(4),其中,所述推进装置(2)被置于所述检测部分(111)的出口处,并且构造成用于沿所述检测部分(111)拉动所述连续长形元件。18.根据权利要求17所述的装置(99),其中,所述检测部分(111)与所述第一道(110)重合,并且其中,所述推进装置(2)适合于和/或布置为将所述连续长形元件直接馈送至所述馈送点(a)。19.根据权利要求17所述的装置(99),其中,所述第一道(110)包括置于所述检测部分(111)下游的缓冲部分(112),其中,所述缓冲部分(112)的出口与所述第一道(110)的出口重合,其中,所述推进系统(1)进一步包括馈送装置(999),所述馈送装置与所述推进装置(2)不同并分开,所述馈送装置构造成用于抓取所述连续长形元件并适合用于和/或布置用于将所述连续长形元件馈送至、优选地直接馈送至所述馈送点(a),其中,所述馈送装置(999)被放置在所述缓冲部分(112)的出口处,并且构造成用于沿所述缓冲部分(112)拉动所述连续长形元件,并且其中,所述馈送装置(999)包括所述推进装置(2)的一个或多个特征。20.根据权利要求13至19中任一项所述的装置(99),包括:第一张紧系统(16),所述第一张紧系统用于沿包含检测点(r)的检测部分(111)张紧所述连续长形元件;以及第二张紧系统(21),所述第二张紧系统用于在所述检测部分(111)上游张紧所述连续长形元件,其中,所述第一张紧系统(16)包括制动装置(18),用于至少部分地制动所述连续长形元件沿所述检测部分(111)的推进,其中,所述第一张紧系统(16)和第二张紧系统(21)中的每一个都包括适合连续检测所述连续长形元件的张力的相应的张力传感器(17,22),并且其中所述指令和控制单元(26)与所述第一张紧系统(16)和第二张紧系统(21)相连。
技术总结
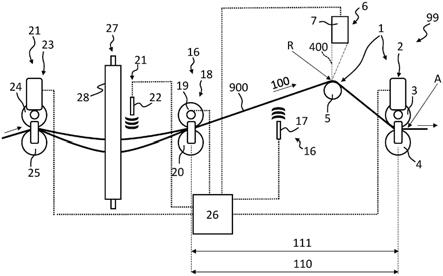
用于计量连续长形元件(900)的方法和装置(99),用于沿第一道(110)以推进方向(100)推进连续长形元件(900),用于以馈送速度将连续长形元件(900)馈送至馈送点(A);用于在沿第一道(110)的检测点(R)处连续光学检测与连续长形元件(900)的在垂直于推进方向(100)的平面上的截面有关的几何信息;用于基于该几何信息连续计算代表该截面(200)的面积延伸的值;以及用于基于代表该面积延伸的值和在馈送点(A)处的连续长形元件(900)的馈送流率的参考值,连续调整馈送速度。续调整馈送速度。续调整馈送速度。
技术研发人员:A
受保护的技术使用者:倍耐力轮胎股份公司
技术研发日:2020.10.08
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。