1.本发明涉及一种透镜镜筒、具备该透镜镜筒的透镜装置以及该透镜镜筒的制造方法。
背景技术:
2.专利文献1中记载了一种透镜镜筒,其中,将透镜框和与凸轮筒的凸轮槽卡合的辊通过螺钉和粘接剂固定。在该透镜镜筒中,在设置于透镜框的凹部中插入有辊的一部分的状态下,固定透镜框和辊。
3.专利文献2至专利文献6中记载了一种透镜装置,其中,通过螺纹固定可移动的透镜框和与凸轮筒的凸轮槽卡合的卡合部件。在这些透镜装置中,在设置于透镜框的凹部中插入有卡合部件的一部分的状态下,固定透镜框和卡合部件。
4.以往技术文献
5.专利文献
6.专利文献1:日本特开2009-86567号公报
7.专利文献2:日本特开2004-94022号公报
8.专利文献3:日本特开2017-49466号公报
9.专利文献4:日本特开2006-23359号公报
10.专利文献5:日本特开2005-292359号公报
11.专利文献6:日本特开2006-178236号公报
技术实现要素:
12.本发明的技术所涉及的1个实施方式提供一种能够以低成本制造提高透镜的位置调整的自由度且具有期望的光学特性的透镜装置的透镜镜筒、具备该透镜镜筒的透镜装置以及透镜镜筒的制造方法。
13.用于解决技术课题的手段
14.根据本发明的技术的一方面的透镜镜筒具备:筒状的凸轮从动件、具有与上述凸轮从动件卡合的凸轮槽的凸轮筒、以及支承透镜的透镜支承部件,上透镜支承部件具有突出部,所述突出部从外周部向上述透镜的径向外侧突出且插入于上述凸轮从动件中,上述凸轮从动件和上述透镜支承部件以未紧固状态固接。
15.本发明的技术的一方面的透镜装置具备上述透镜镜筒。
16.本发明的技术的一方面的透镜镜筒的制造方法中,所述透镜镜筒具有:透镜支承部件,支承透镜;突出部,从上述透镜支承部件的外周部向上述透镜的径向外侧突出;筒状的凸轮从动件,插入有上述突出部,且在内部与上述突出部固接;及凸轮筒,具有与上述凸轮从动件卡合的凸轮槽,其中,在上述凸轮筒的内部配置了将上述突出部插入上述凸轮从动件的状态的上述透镜支承部件的状态下移动上述突出部,在各移动位置,根据通过上述透镜拍摄测试图而得的图像确定上述突出部的位置之后,在该位置固接上述突出部和上述
凸轮从动件。
17.本发明的技术的一方式的透镜镜筒具备:筒状的凸轮从动件;凸轮筒,具有与上述凸轮从动件卡合的凸轮槽;及透镜支承部件,支承透镜,上述透镜支承部件具有突出部,上述突出部从外周部向上述透镜的径向外侧突出且插入于上述凸轮从动件中,沿上述透镜的周向等间隔具有3个上述突出部及上述凸轮从动件,上述3组中的第一组中,在上述突出部与上述凸轮从动件的内壁之间在特定方向上形成有间隙,上述间隙的大小为上述3组中的上述第一组以外的2个第二组各自中在上述突出部与上述凸轮从动件的内壁之间形成的上述特定方向的间隙的大小以下。
18.本发明的技术的一方式的透镜镜筒具备:筒状的凸轮从动件;凸轮筒,具有与上述凸轮从动件卡合的凸轮槽;及透镜支承部件,支承透镜,上透镜支承部件具有突出部,上述突出部从外周部向上述透镜的径向外侧突出且插入于上述凸轮从动件中,上述凸轮从动件中,在上述凸轮从动件的内部且轴向上与上述透镜支承部件接触的接触面的数量为1个或0个。
19.本发明的技术的一方式的透镜镜筒具备:筒状的凸轮从动件;凸轮筒,具有与上述凸轮从动件卡合的凸轮槽;及透镜支承部件,支承透镜,上透镜支承部件具有突出部,上述突出部从外周部向上述透镜的径向外侧突出且插入于上述凸轮从动件中,上述凸轮从动件具有多个在轴向上与上述透镜支承部件接触的接触面,上述多个接触面中,沿上述轴向观察时与另一上述接触面重叠的接触面的数量为0个。
20.本发明的技术的一方式的透镜镜筒具备:筒状的凸轮从动件;凸轮筒,具有与上述凸轮从动件卡合的凸轮槽;及透镜支承部件,支承透镜,上述透镜支承部件具有突出部,上述突出部从外周部向上述透镜的径向外侧突出且插入于上述凸轮从动件中,在上述突出部与上述凸轮从动件的内壁之间在特定方向上形成有间隙,上述特定方向分别是上述透镜的移动方向、上述凸轮从动件的轴向、以及与上述移动方向和上述轴向正交的方向。
21.发明效果
22.根据本发明,能够提供一种能够以低成本制造提高透镜的位置调整的自由度且具有期望的光学特性的透镜装置的透镜镜筒、具备该透镜镜筒的透镜装置以及透镜镜筒的制造方法。
附图说明
23.图1是表示在本发明的一实施方式的透镜装置中包含的透镜镜筒100的外观结构的立体图。
24.图2是图1的透镜镜筒100的局部剖视图。
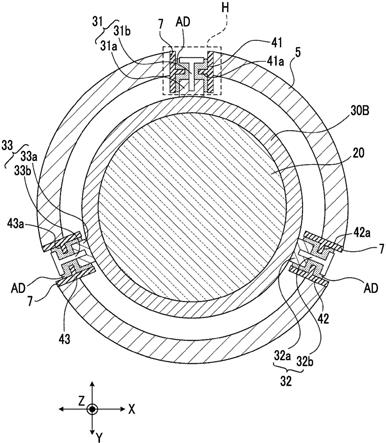
25.图3是图2的a-a线的截面示意图。
26.图4是图3所示的范围h的放大图。
27.图5是从径向外侧观察图4所示的凸轮从动件41和突出部31的示意图。
28.图6是表示图1所示的透镜镜筒100的制造系统200的示意图。
29.图7是表示图2的a-a线的截面的变形例的示意图。
具体实施方式
30.以下,参考附图对本发明的实施方式进行说明。
31.图1是表示在本发明的一实施方式的透镜装置中包含的透镜镜筒100的外观结构的立体图。图2是图1的透镜镜筒100的局部剖视图。图3是图2的a-a线的截面示意图。另外,通过在图1所示的透镜镜筒100的凸轮筒5的外周面被在此一体地连结的变焦环覆盖,而构成透镜装置。在图1中,将在透镜镜筒100中包含的透镜的移动方向记载为方向z,将与z方向垂直的2个方向中的一个记载为方向x,将这2个方向中的另一个记载为方向y。
32.透镜镜筒100在后端具有安装环2,并且安装在相机主体、投影仪主体等上。透镜镜筒100的前端设有对焦环3,当对焦环3转动时,装有对焦透镜组的对焦镜筒4经由螺旋面前后移动进行对焦。
33.对焦环3的后方设有凸轮筒5。如图2所示,凸轮筒5旋转自如地支承在固定筒6的外侧,其位置被限制为不能沿方向z移动。在凸轮筒5中形成有3种凸轮槽7、8及9。凸轮槽7形成在相对于光轴p以120
°
旋转对称的3个位置,且分别卡合有凸轮从动件41、42或43(参考图3)。为了便于图示,图1中仅示出2个凸轮槽7以及分别与这些凸轮槽7卡合的凸轮从动件41及42。凸轮槽8形成在相对于光轴p以120
°
旋转对称的3个位置,且分别卡合有凸轮从动件11。凸轮槽9形成在相对于光轴p以120
°
旋转对称的3个位置,且分别卡合有凸轮从动件12。为了便于图示,图1中仅示出1个凸轮槽8和与凸轮槽8卡合的1个凸轮从动件11,以及1个凸轮槽9和与凸轮槽9卡合的1个凸轮从动件12。另外,凸轮槽8及9相对于凸轮槽7设置在旋转方向的相位不同的位置,以使凸轮槽7、8、9互不干涉。
34.透镜框30a、30b及30c分别单独支承透镜组20。凸轮从动件41与透镜框30b(参考图2)固接。凸轮从动件42、43与凸轮从动件41同样地与透镜框30b固接(参考图3)。另外,凸轮从动件11与透镜框30a固接,凸轮从动件12与透镜框30c固接。当凸轮筒5旋转时,对应于各自的凸轮槽7、8、9的形状,各自的透镜框30a、30b及30c一起沿方向z移动而进行变倍。另外,透镜组20中包含的透镜的数量至少为1个即可。在图1中,将圆筒状的凸轮从动件41的轴向设为方向y。
35.如图3所示,透镜框30b由大致圆筒状的部件构成,具备从其外周部向透镜组20的径向外侧突出的柱状突出部31、32及33。
36.突出部31、32及33沿透镜组20的周向等间隔配置,并分别插入于圆筒状的凸轮从动件41、42及43中。突出部31、32及33分别在凸轮从动件41、42及43的内部,通过粘接剂ad与凸轮从动件41、42及43固接。
37.突出部31由设置在透镜组20的径向内侧的圆柱状的主体部31a和固定在主体部31a的径向外侧的面的大致t字状的销31b构成。销31b螺合于形成在主体部31a的螺纹孔中并固定于主体部31a。
38.主体部31a可以与透镜框30b一体成型,也可以由通过螺纹等固定在透镜框30b上的其他部件构成。
39.突出部32是与突出部31同样的结构,由设置在透镜组20的径向内侧的圆柱状的主体部32a和固定在主体部32a的径向外侧的面的大致t字状的销32b构成。销32b螺合于形成在主体部32a的螺纹孔中并固定于主体部31a。主体部32a可以与透镜框30b一体成型,也可以由通过螺纹等固定在透镜框30b上的其他部件构成。
40.突出部33是与突出部31同样的结构,设置在透镜组20的径向内侧的圆柱状的主体部33a和固定在主体部33a的径向外侧的面的大致t字状的销33b构成。销33b拧入形成在主体部33a的螺纹孔中并固定于主体部33a。主体部33a可以与透镜框30b一体成型,也可以由通过螺纹等固定在透镜框30b上的其他部件构成。
41.图4是图3所示的范围h的放大图。图5是从径向外侧观察图4所示的凸轮从动件41和突出部31的示意图。
42.如图4和图5所示,凸轮从动件41具有在其内部中内径缩小的圆环状缩径部41a。销31b由沿透镜组20的径向(图4和图5中的方向y)延伸的圆柱状的轴部311和与该径向正交的圆板状的平板部310构成。
43.突出部31的轴部311的直径小于凸轮从动件41的缩径部41a的开口41b的直径。轴部311在贯穿该开口41b的状态下配置。突出部31的平板部310的直径大于开口41b的直径,并且与主体部31a的直径相同。
44.凸轮从动件42与凸轮从动件41同样地具有缩径部42a,并且成为销32b的轴部贯穿该缩径部42a的开口的状态。凸轮从动件43与凸轮从动件41同样地具有缩径部43a,并且成为销33b的轴部贯穿该缩径部43a的开口的状态。
45.另外,图2所示的凸轮从动件11和透镜框30a例如通过螺纹固接。并且,图2所示的凸轮从动件12和透镜框30c例如通过螺纹固接。
46.图3所示的透镜框30b如下进行位置调整。通过粘接剂ad进行固接之前,在突出部31、32及33分别插入凸轮从动件41、42及43中的状态下,透镜框30b配置于凸轮筒5内。而且,在突出部31的销31b的平板部310上安装用于把持的附件,该附件由工业用机器人把持。
47.在工业用机器人中,与透镜组20的光轴垂直的平面成为与方向y和方向x平行的状态,并且突出部31的中心轴和凸轮从动件41的中心轴成为一致的状态,并且在成为凸轮从动件41的内壁和突出部31不接触的状态下,保持透镜框30b。这种状态称为基准状态。
48.图2和图3示出了在该基准状态下凸轮从动件41、42及43以及突出部31、32及33分别通过粘接剂ad固接的状态。
49.如图2所示,在基准状态下,透镜框30b与凸轮从动件41之间沿方向y存在宽度l的间隙。
50.如图4所示,在基准状态下,在突出部31与凸轮从动件41的内壁之间沿方向y形成宽度y1的间隙。另外,在本说明书中,2个物体之间的“间隙”表示2个物体没有直接接触。换言之,本说明书中的“间隙”包括2个物体之间为空间的情况和2个物体之间存在其他物体的情况。例如,图2所示的透镜框30b与凸轮从动件41之间存在宽度l的空间的结构也称为“透镜框30b与凸轮从动件41之间存在间隙”,图4所示的突出部31与凸轮从动件41的内壁之间填充有粘接剂ad的结构也称为“突出部31与凸轮从动件41的内壁之间存在间隙"。并且,“特定方向上的2个物体之间的间隙”是指2个物体在特定方向上存在“间隙”。“特定方向”是指任意方向。宽度y1成为小于图2所示的宽度l的值。
51.并且,如图4所示,在基准状态下,在突出部31与凸轮从动件41的内壁之间沿方向x形成宽度x1的间隙。
52.并且,如图5所示,在基准状态下,在突出部31与凸轮从动件41的内壁之间沿方向z形成宽度z1的间隙。宽度y1、宽度x1、宽度z1分别例如成为相同的值,但也可以成为不同的
值。
53.在该基准状态下,在突出部32与凸轮从动件42的内壁之间形成的方向y上的间隙的大小及在突出部33与凸轮从动件43的内壁之间形成的方向y上的间隙的大小分别成为宽度y1以上。
54.并且,在该基准状态下,在突出部32与凸轮从动件42的内壁之间形成的方向x上的间隙的大小及在突出部33与凸轮从动件43的内壁之间形成的方向x上的间隙的大小分别成为宽度x1以上。
55.并且,在该基准状态下,在突出部32与凸轮从动件42的内壁之间形成的方向z上的间隙的大小及在突出部33与凸轮从动件43的内壁之间形成的方向z上的间隙的大小分别成为宽度z1以上。
56.因此,当从基准状态使透镜框30b移动到方向x的一侧或另一侧时,能够移动透镜框30b,直至突出部31抵接在凸轮从动件41的内壁上,即相当于移动宽度x1的距离。
57.并且,当从基准状态使透镜框30b移动到方向z的一侧或另一侧时,能够移动透镜框30b,直至突出部31抵接在凸轮从动件41的内壁上,即相当于移动宽度z1的距离。
58.并且,当从基准状态使透镜框30b移动到方向y的一侧或另一侧时,能够移动透镜框30b,直至突出部31抵接在凸轮从动件41的内壁上,即相当于移动宽度y1的距离。另外,由于宽度l大于宽度y1,因此透镜框30b向方向y移动,突出部31的主体部31a抵接在凸轮从动件41的内壁的状态下,凸轮从动件41与透镜框30b成为不抵接的状态。
59.并且,基准状态下,当透镜框30b向方向z的一侧或另一侧倾斜时,能够使透镜框30b沿方向x延伸并且绕与光轴交叉的轴(θx轴)旋转,直至突出部31抵接在凸轮从动件41的内壁上。
60.并且,基准状态下,在直至突出部32及33抵接在凸轮从动件42及43的内壁上的范围,能够使透镜框30b沿方向y延伸并且绕与光轴交叉的轴(θy轴)旋转。
61.通过上述工业用机器人,一边改变透镜框30b的方向x的位置、方向y的位置、方向z的位置、绕θx轴的旋转角度和绕θy轴的旋转角度,一边调整透镜框30b的最佳位置,在该位置保持透镜框30b。而且,在该状态下,通过在凸轮从动件41、42及43的内部填充粘接剂ad并将其固化,透镜框30b与凸轮从动件41、42及43固接。
62.如上所述,在基准状态下,在凸轮从动件41、42及43的内壁与突起部31、32及33之间存在足以使透镜框30b沿方向x、方向y、方向z能够移动的间隙。即,在凸轮从动件和突出部的组的3个组分别成为凸轮从动件的内壁和突出部不接触。因此,即使在突出部31沿方向y移动到最大限度的状态下与凸轮从动件41固接时,在突出部31、32及33与凸轮从动件41、42及43的内壁之间,在方向y上也具有间隙。并且,这种情况下,在突出部32及33与凸轮从动件42及43的内壁之间,在凸轮从动件42及43的轴向上也具有间隙。
63.并且,即使在突出部31沿方向x移动到最大限度的状态下与凸轮从动件41固接时,在突出部31、32及33与凸轮从动件41、42及43的内壁之间,在方向x上也具有间隙。并且,这种情况下,在突出部32及33与凸轮从动件42及43的内壁之间,在凸轮从动件42及43的轴向上也具有间隙。
64.并且,即使在突出部31沿方向z移动到最大限度的状态下与凸轮从动件41固接时,在突出部31、32及33与凸轮从动件41、42及43的内壁之间,在方向z上也具有间隙。并且,这
种情况下,在突出部32及33与凸轮从动件42及43的内壁之间,在凸轮从动件42及43的轴向上也具有间隙。
65.即,无论在移动透镜框30b的范围内如何移动并固接的情况下,与透镜框30b固接的凸轮从动件41、42及43分别具有1个或0个在凸轮从动件41、42及43的内部且在周向上与透镜框30b接触的接触面。
66.如现有技术,通过螺纹紧固固定凸轮从动件和透镜框时,成为通过拧入于透镜框的螺纹和透镜框来夹持凸轮从动件的状态。如此,在透镜框和凸轮从动件通过螺纹紧固来固定的结构中,在凸轮从动件中,存在2个与由透镜框和螺纹构成的部分的接触面,并且从径向观察时成为该2个接触面重叠的状态。在这种状态下,尤其难以调整透镜框在径向上的位置。
67.在本方式的透镜镜筒100中,凸轮从动件41、42及43与透镜框30b以未紧固状态固接。这里的未紧固状态是指凸轮从动件41、42及43与透镜框30b没有通过螺纹等紧固部件连接的状态。
68.即,如现有技术,将凸轮从动件和透镜框通过螺纹接连的结构称为紧固状态。在该连结状态下,位于凸轮从动件中的最外周的筒状部件成为被插入于其内部的部分(具体而言,螺纹头)和未插入于其内部的部分即透镜框或与其固定的部分夹持的状态。
69.另一方面,本方式中,凸轮从动件41、42及43不会成为被插入于其内部的突出部31、32及33与透镜框30b的外周部夹持的状态。即,凸轮从动件41、42及43分别为在轴向上与透镜框30b接触的接触面的数量为1个或0个的结构。
70.因此,凸轮从动件41、42及43为在凸轮从动件41、42及43的内部并且在轴向上与透镜框30b接触的接触面的数量为1个或0个的结构能够称为上述未紧固状态。如上所述,凸轮从动件41、42及43与透镜框30b以未紧固状态固接,从而能够充分确保透镜框30b的径向的位置调整量。
71.另外,上述说明中,图2中的宽度l大于图4中的宽度y1,但是也可以考虑宽度l与宽度y1相同的结构。此时,基准状态下,当透镜框30b最大限度地向方向y的外侧移动的状态下,凸轮从动件41的透镜框30b侧的端面与透镜框30b的外周部接触。即,凸轮从动件41具有2个在轴向上与透镜框30b接触的接触面。
72.然而,当沿凸轮从动件41的轴向观察时这2个接触面不重叠。即,当沿凸轮从动件41的轴向观察时不重叠的接触面的数量为0个。即,在透镜镜筒100中,无法成为透镜框30b被凸轮从动件41夹持的结构。因此,能够充分确保透镜框30b的径向的位置调整量。如上所述,凸轮从动件41具有2个在轴向上与透镜框30b接触的接触面,并且当沿凸轮从动件的轴向观察时这2个接触面不重叠的结构也能够称为上述未紧固状态。
73.图6是表示图1所示的透镜镜筒100的制造系统200的示意图。制造系统200具备摄像装置101、控制装置102、工业用机器人103和分辨率图表104。控制装置102控制摄像装置101和工业用机器人103。
74.首先,准备将透镜镜筒100的凸轮筒5内的透镜框30b和凸轮从动件41、42及43固接之前的状态的透镜镜筒100a。该透镜镜筒100a中,成为在凸轮从动件41、42及43插入突出部31、32及33的状态的透镜框30b配置于凸轮筒5的内部的状态。另外,关于另一个透镜框30a和透镜框30c,成为配置在凸轮筒5内并且与凸轮从动件11、12螺纹固定的状态。
75.将该透镜镜筒100a配置在摄像装置101和分辨率图表104之间,连接工业用机器人103的臂和安装到透镜框30b的销31b的附件。另外,销31b可以由臂直接把持。工业用机器人103根据来自控制装置102的指令,将透镜框30b的位置控制为基准状态。
76.在这种状态下,经由透镜镜筒100a通过摄像装置101拍摄分辨率图表104。控制装置102根据从摄像装置101输出的拍摄图像,生成透镜框30b的位置调整信息(移动方向和移动量)。
77.控制装置102控制工业用机器人103,以便根据该位置调整信息移动透镜框30b。移动方向中有方向x、方向y、方向z、绕θx轴及绕θy轴这5个方向。工业用机器人103根据来自控制装置102的指令,将透镜框30b的位置从基准状态移动。
78.之后,重复进行分辨率图表104的拍摄、基于拍摄图像的位置调整信息的生成、基于该位置调整信息的透镜框30b的移动,直到透镜镜筒100a的光学特性成为最佳。
79.而且,当透镜镜筒100a的光学特性成为最佳时,通过省略图示的粘接剂注入装置在凸轮从动件41、42及43每一个的内部注入粘接剂ad,凸轮从动件41、42及43与透镜框30b固接。
80.另外,本方式中,不进行透镜框30a、30c的位置调整,但在需要调整这些位置时,以与凸轮从动件41和透镜框30b之间的关系相同的方式,设为以未紧固状态进行凸轮从动件11与透镜框30a的固接、凸轮从动件12与透镜框30c的固接的结构即可。
81.如上所述,透镜镜筒100为凸轮从动件41、42及43和插入其中的突出部31、32及33以未紧固状态固接的结构。即,凸轮从动件41、42及43为不具有被透镜框30b夹持的部分(仅具有少于2个的上述接触面,或者不具有在上述凸轮从动件的轴向上重叠的2个接触面)的结构。
82.根据该结构,只要是固接前的状态,就能够使透镜框30b至少在方向y上移动足够的量。透镜的径向移动极大地有助于调整来自物体的光的聚光位置。因此,通过能够充分地调整透镜框30b的方向y的位置,即使透镜框30a或透镜框30c产生组装误差等,也能够将透镜镜筒100的光学特性调整至期望的状态。
83.并且,如图3所示,透镜镜筒100在突出部31、32及33与凸轮从动件41、42及43的内壁之间沿方向x形成有间隙。因此,只要是固接前的状态,就能够使透镜框30b在方向x上移动。透镜的方向x的移动极大地有助于调整来自物体的光的聚光位置。因此,通过能够调整透镜框30b的方向x的位置,即使透镜框30a或透镜框30c产生组装误差等,也能够将透镜镜筒100的光学特性调整至期望的状态。
84.并且,如图2所示,透镜镜筒100在突出部31、32及33与凸轮从动件41、42及43的内壁之间沿方向z形成有间隙。因此,只要是固接前的状态,就能够使透镜框30b在方向z、绕θx轴和绕θy轴移动。如此,透镜镜筒100能够在5轴方向上调整透镜框30b的位置。因此,即使透镜框30a或透镜框30c产生组装误差等,也容易将透镜镜筒100的光学特性调整为期望的状态。换言之,由于无需严格要求透镜框30a或透镜框30c的尺寸精度和组装精度,因此能够降低制造成本。
85.为了使透镜镜筒100小型化,需要减少包含在其中的透镜的数量。然而,为了在不降低画质(分辨率、色差等)的情况下减少透镜数量,需要提高透镜镜筒100整体的灵敏度。灵敏度是指聚光位置相对于透镜的尺寸误差和组装误差的偏差量的大小。灵敏度越高,即
使有轻微的尺寸误差或组装误差,聚光位置的偏差也越大。因此,如本方式那样,通过能够在5轴方向上调整透镜位置,即使提高透镜镜筒100整体的灵敏度也能够实现充分的画质,其结果,能够实现透镜镜筒100的小型化。
86.并且,根据透镜镜筒100,由于突出部31被设置成凸轮从动件41的缩径部位于主体部31a和销31b之间,因此能够加大凸轮从动件41和突出部31的粘接面积。因此,能够提高基于粘接剂ad的突出部31和凸轮从动件41之间的粘接力。并且,突出部32和凸轮从动件42、突出部33和凸轮从动件43与突出部31和凸轮从动件41也为相同的结构,因此能够提高基于粘接剂ad的粘接力。
87.以下,对透镜镜筒100的优选方式进行说明。
88.(第一方式)
89.突出部31、32及33和凸轮从动件41、42及43优选分别由透明材料构成。当使用紫外线固化树脂等的光固化性材料作为粘接剂ad时,突出部31、32、33和凸轮从动件41、42、43成为透明,从而容易使光照射到粘接剂ad整体上,能够实现固接力和固接速度的提高。
90.(第二方式)
91.粘接剂ad优选通过由特定波长区域(例如,波长365nm以上的紫外区域至可见区域)的光固化的粘接剂ad来固接。根据该结构,能够使光到达粘接剂ad的内部,能够实现固接力和固接速度的提高。
92.(第三方式)
93.粘接剂ad优选为弹性粘接剂。弹性粘接剂例如为以聚氨酯树脂或硅酮树脂为主要成分的粘接剂等。根据该结构,即使凸轮从动件和透镜框以未紧固状态固接,也能够提高透镜镜筒100的耐冲击性和耐振动性。
94.(第四方式)
95.凸轮从动件41、42及43的内周面优选被易粘接性材料包覆。易粘接性材料为底漆等。例如,能够使用unitika ltd.制造的arrowbase(注册商标)或elitel(注册商标)。根据该结构,能够提高突出部31、32及33与凸轮从动件41、42及43之间的固接力。另一方面,凸轮从动件41、42及43由氟树脂等难粘接性材料构成,从而能够确保与凸轮筒5的滑动性。
96.(第五方式)
97.凸轮从动件41、42及43的内周面优选通过纹理加工或喷砂等进行粗面化处理。根据该结构,能够提高突出部31、32及33与凸轮从动件41、42及43之间的固接力。
98.以下,对透镜镜筒100的变形例进行说明。
99.(第一变形例)
100.突出部31、32及33和凸轮从动件41、42及43可以代替粘接剂而通过焊料或焊接来固接。根据该结构,无需考虑粘接剂的固化时的收缩,能够容易地进行固接。
101.(第二变形例)
102.上述凸轮从动件和突出部的形状为一例,能够采用各种结构。
103.主体部31a、32a、33a不限于圆柱状,例如可以是多棱柱状等。突出部31的轴部311的形状不限于圆柱状,例如可以是棱柱状。突出部31的平板部310的形状不限于圆形的板状,例如可以是多边形的板状。并且,突出部31、32及33不限于柱状,只要以将透镜框30b移动至最佳位置的程度在与凸轮从动件41、42或43的内壁之间存在间隙,并且能够在凸轮从
动件41、42或43的内部中与凸轮从动件41,42或43固接,则也可以是其他形状。并且,凸轮从动件41、42及43的缩径部41a、42a、43a的开口形状不限于圆形,例如可以是多边形。
104.并且,如图7所示,可以将突出部31、32及33分别作为在径向上延伸的圆柱或棱柱形状,将凸轮从动件41、42及43分别形成为在内侧不具有缩径部的圆筒状。根据该结构,能够简化凸轮从动件和突出部的结构,能够降低制造成本。
105.如以上所说明那样,在本说明书中公开有至少以下事项。另外,括号内示出在上述实施方式中相对应的构成要件等,但并不限定于此。
106.(1)
107.一种透镜镜筒(透镜镜筒100),其具备:筒状的凸轮从动件(凸轮从动件41);
108.凸轮筒(凸轮筒5),具有与上述凸轮从动件卡合的凸轮槽(凸轮槽9);及
109.透镜支承部件(透镜框30b),支承透镜(透镜组20),
110.上述透镜支承部件具有突出部(突出部31),上述突出部从外周部向上述透镜的径向外侧突出且插入于上述凸轮从动件中,
111.上述凸轮从动件和上述透镜支承部件以未紧固状态固接。
112.(2)
113.根据(1)所述的透镜镜筒,其中,
114.上述凸轮从动件中,在上述凸轮从动件的内部且轴向上与上述透镜支承部件接触的接触面的数量为1个或0个。
115.(3)
116.根据(1)所述的透镜镜筒,其中,
117.上述凸轮从动件具有多个在轴向上与上述透镜支承部件接触的接触面,
118.上述多个接触面中,沿上述轴向观察时与另一上述接触面重叠的接触面的数量为0个。
119.(4)
120.根据(1)所述的透镜镜筒,其中,
121.沿上述透镜的周向等间隔具有3个上述突出部及上述凸轮从动件的组,
122.在上述3组(凸轮从动件41和突出部31、凸轮从动件42和突出部32、凸轮从动件43和突出部33)中的第一组(凸轮从动件41和突出部31)中,在上述突出部与上述凸轮从动件的内壁之间在特定方向上形成有间隙,上述间隙的大小为在上述3个组中的上述第一组以外的2个第二组(凸轮从动件42和突出部32,凸轮从动件43和突出部33)各自中在上述突出部与上述凸轮从动件的内壁之间形成的上述特定方向的间隙的大小以下。
123.(5)
124.根据(4)所述的透镜镜筒,其中,
125.上述特定方向是上述透镜的移动方向(方向z)、上述凸轮从动件的轴向(方向y)、以及与上述移动方向和上述轴向正交的方向(方向x)中的至少1个。
126.(6)
127.根据(1)所述的透镜镜筒,其中,
128.在上述突出部与上述凸轮从动件的内壁之间形成有特定方向上的间隙,
129.上述特定方向分别是上述透镜的移动方向(方向z)、上述凸轮从动件的轴向(方向
y)、以及与上述移动方向和上述轴向正交的方向(方向x)。
130.(7)
131.根据(1)至(5)中任一项所述的透镜镜筒,其中,
132.上述凸轮从动件的内壁和上述突出部以上述凸轮从动件的轴向上具有间隙的状态固接。
133.(8)
134.根据(1)所述的透镜镜筒,其中,
135.沿上述透镜的周向等间隔具有3个上述突出部及上述凸轮从动件的组。
136.(9)
137.根据(8)所述的透镜镜筒,其中,
138.上述3个上述组各自中上述突出部与上述凸轮从动件的内壁不接触。
139.(10)
140.根据(1)至(9)中任一项所述的透镜镜筒,其中,
141.上述突出部和上述凸轮从动件通过粘接剂(粘接剂ad)、焊料或焊接固接。
142.(11)
143.根据(1)至(10)中任一项所述的透镜镜筒,其中,
144.上述凸轮从动件的内周面被易粘接性材料包覆。
145.(12)
146.根据(1)至(11)中任一项所述的透镜镜筒,其中,
147.上述凸轮从动件的内周面经过粗糙化处理。
148.(13)
149.根据(1)至(12)中任一项所述的透镜镜筒,其中,
150.上述突出部和上述凸轮从动件分别由透明材料构成。
151.(14)
152.根据(1)至(13)中任一项所述的透镜镜筒,其中,
153.上述突出部和上述凸轮从动件通过粘接剂固接,
154.上述粘接剂通过特定波长区域的光固化。
155.(15)
156.根据(1)至(13)中任一项所述的透镜镜筒,其中,
157.上述突出部和上述凸轮从动件通过弹性粘接剂固接。
158.(16)
159.根据(1)至(15)中任一项所述的透镜镜筒,其中,
160.在与上述凸轮从动件的轴向正交且彼此正交的2个方向(方向x、方向z)中的一个方向上的上述突出部的长度比在上述凸轮从动件的内部的上述一个方向的长度短。
161.(17)
162.根据(16)所述的透镜镜筒,其中,
163.上述2个方向中的另一方向上的上述突出部的长度比上述凸轮从动件的内部的上述另一方向的长度短。
164.(18)
165.一种透镜装置,其具备(1)至(17)中任一项所述的透镜镜筒。
166.(19)
167.一种透镜镜筒的制造方法,上述透镜镜筒具有:透镜支承部件,支承透镜;突出部,从上述透镜支承部件的外周部向上述透镜的径向外侧突出;筒状的凸轮从动件,插入有上述突出部,且在内部与上述突出部固接;及凸轮筒,具有与上述凸轮从动件卡合的凸轮槽,其中,
168.在将上述凸轮从动件插入上述突出部的状态的上述透镜支承部件配置于上述凸轮筒的内部的状态下移动上述突出部,在各移动位置,根据通过上述透镜拍摄测试图(分辨率图表104)而得的图像确定上述突出部的位置之后,在该位置固接上述突出部和上述凸轮从动件。
169.(20)
170.一种透镜镜筒,其具备:筒状的凸轮从动件(凸轮从动件41);
171.凸轮筒(凸轮筒5),具有与上述凸轮从动件卡合的凸轮槽(凸轮槽9);及
172.透镜支承部件(透镜框30b),支承透镜(透镜组20),
173.上述透镜支承部件具有突出部(突出部31),上述突出部从外周部向上述透镜的径向外侧突出且插入于上述凸轮从动件中,
174.沿上述透镜的周向等间隔具有3个上述突出部及上述凸轮从动件的组,
175.上述3组中的第一组中,在上述突出部与上述凸轮从动件的内壁之间在特定方向上形成有间隙,上述间隙的大小为上述3组中的上述第一组以外的2个第二组各自中在上述特定方向的上述突出部与上述凸轮从动件的内壁之间形成的上述特定方向的间隙的大小以下。
176.(21)
177.一种透镜镜筒,其具备:筒状的凸轮从动件(凸轮从动件41);
178.凸轮筒(凸轮筒5),具有与上述凸轮从动件卡合的凸轮槽(凸轮槽9);及
179.透镜支承部件(透镜框30b),支承透镜(透镜组20),
180.上述透镜支承部件具有突出部(突出部31),上述突出部从外周部向上述透镜的径向外侧突出且插入于上述凸轮从动件中,
181.上述凸轮从动件中,在上述凸轮从动件的内部且轴向上与上述透镜支承部件接触的接触面的数量为1个或0个。
182.(22)
183.一种透镜镜筒,其具备:筒状的凸轮从动件(凸轮从动件41);
184.凸轮筒(凸轮筒5),具有与上述凸轮从动件卡合的凸轮槽(凸轮槽9);及
185.透镜支承部件(透镜框30b),支承透镜(透镜组20),
186.上述透镜支承部件具有突出部(突出部31),上述突出部从外周部向上述透镜的径向外侧突出且插入于上述凸轮从动件中,
187.上述凸轮从动件具有多个在轴向上与上述透镜支承部件接触的接触面,
188.上述多个接触面中,沿上述轴向观察时与另一上述接触面重叠的接触面的数量为0个。
189.(23)
190.一种透镜镜筒,其具备:筒状的凸轮从动件(凸轮从动件41);
191.凸轮筒(凸轮筒5),具有与上述凸轮从动件卡合的凸轮槽(凸轮槽9);及
192.透镜支承部件(透镜框30b),支承透镜(透镜组20),
193.上述透镜支承部件具有突出部(突出部31),上述突出部从外周部向上述透镜的径向外侧突出且插入于上述凸轮从动件中,
194.在上述突出部与上述凸轮从动件的内壁之间在特定方向上形成有间隙。
195.上述特定方向分别是上述透镜的移动方向、上述凸轮从动件的轴向、以及与上述移动方向和上述轴向正交的方向。
196.以上,参考附图对各种实施方式进行了说明,当然本发明并不限定于该例子。显然,若为本领域技术人员,则能够在权利要求书中所记载的范围内想到各种变更例或修正例,应理解这些变更例或修正例理所当然也属于本发明的技术范围内。并且,可以在不脱离发明的宗旨的范围内任意地组合上述实施方式中的各构成要件。
197.另外,本技术基于2019年9月30日申请的日本专利申请(日本特愿2019-180137),其内容作为参考援用于本技术中。
198.符号说明
199.宽度-y1、x1、z1、l,2-安装环,3-对焦环,4-对焦镜筒,5-凸轮筒,6-固定筒,7、8、9-凸轮槽,11、12、41、42、43-凸轮从动件,20-透镜组,30a、30b、30c-透镜框,31a、32a、33a-主体部,31b、32b、33b-销,31、32及33-突出部,41a、42a、43a-缩径部,41b-开口,100a、100-透镜镜筒,101-摄像装置,102-控制装置,103-工业用机器人,104-分辨率图表,200-制造系统,310-平板部,311-轴部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。