技术特征:
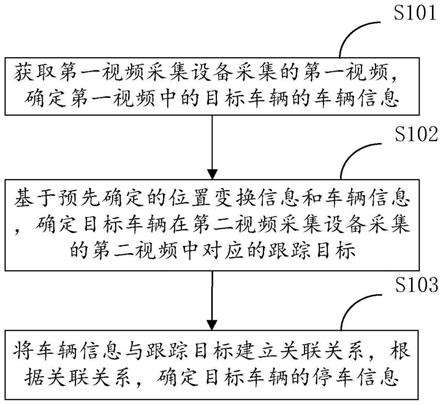
1.一种目标跟踪方法,包括:获取第一视频采集设备采集的第一视频,确定所述第一视频中的目标车辆的车辆信息;基于预先确定的位置变换信息和所述车辆信息,确定所述目标车辆在第二视频采集设备采集的第二视频中对应的跟踪目标;将所述车辆信息与所述跟踪目标建立关联关系,根据所述关联关系,确定所述目标车辆的停车信息;其中,所述第一视频采集设备的采集范围与所述第二视频采集设备的采集范围有交集。2.根据权利要求1所述的方法,还包括:在所述第一视频采集设备采集的视频中的车位对应的区域中确定多个第一关键点的位置;根据所述车位的车位标识和所述多个第一关键点各自的位置,在所述第二视频采集设备采集的视频中,确定所述多个第一关键点各自对应的第二关键点的位置;根据所述多个第一关键点的位置和各自对应的第二关键点的位置,确定所述位置变换信息。3.根据权利要求1或2所述的方法,其中,所述获取第一视频采集设备采集的第一视频,确定所述第一视频中的目标车辆的车辆信息,包括:获取第一视频采集设备采集的第一视频,若目标车辆在所述第一视频中出现的次数超过预设阈值,且所述目标车辆在所述第一视频中的位置满足预设位置条件,则确定所述第一视频中的目标车辆的车辆信息。4.根据权利要求1或2所述的方法,其中,所述基于预先确定的位置变换信息和所述车辆信息,确定所述目标车辆在第二视频采集设备采集的第二视频中对应的跟踪目标,包括:基于预先获取的位置变换信息、所述车辆信息中的车辆位置和行驶信息,确定所述目标车辆在第二视频采集设备采集的第二视频中的预测位置;基于所述预测位置和所述第二视频中的多个目标的位置,确定所述目标车辆在所述第二视频中对应的跟踪目标。5.根据权利要求4所述的方法,其中,所述基于所述预测位置和所述第二视频中的各目标的位置,确定所述目标车辆在所述第二视频中对应的跟踪目标,包括:在所述预测位置和所述第二视频中的多个目标的位置相匹配的情况下,确定所述目标车辆与匹配的多个目标之间的目标相似度;基于所述目标相似度,确定所述目标车辆在所述第二视频中对应的跟踪目标。6.根据权利要求1或2所述的方法,其中,所述根据所述关联关系,确定所述目标车辆的停车信息,包括:基于所述跟踪目标在所述第二视频中的行驶状态,确定所述跟踪目标对应的停车开始时刻和停车结束时刻;根据所述关联关系、所述停车开始时刻和停车结束时刻,确定所述目标车辆的停车信息。7.根据权利要求1或2所述的方法,还包括:
在所述跟踪目标已关联车辆信息的情况下,将已关联车辆信息对应的车辆和所述跟踪目标的相似度,与所述目标车辆和所述跟踪目标的相似度进行比对,根据比对结果,确定是否更新所述跟踪目标关联的车辆信息。8.根据权利要求1或2所述的方法,还包括:在所述第二视频中的任一车辆满足预设条件的情况下,生成转动控制指令,控制所述第一视频采集设备从预设位置转动到目标位置采集第三视频;在所述第三视频采集完成后,控制所述第一视频采集设备转回所述预设位置。9.根据权利要求8所述的方法,还包括:确定两次在预设位置的同一车位采集到的目标是否为同一车辆,如果是,则在确定所述车辆的停车结束时刻后,生成所述车辆对应的停车信息。10.根据权利要求9所述的方法,其中,所述确定两次在预设位置的同一车位采集到的目标是否为同一车辆,包括:对于第一次在预设位置采集到的视频中的第一目标,获取所述第一目标在第二视频采集设备采集的视频中对应的目标的第一目标标识;对于第二次在预设位置采集到的视频中的第二目标,获取所述第二目标在第二视频采集设备采集的视频中对应的目标的第二目标标识;将所述第一目标标识与所述第二目标标识进行比对;若所述第一目标标识和所述第二目标标识匹配,则确定两次在预设位置的同一车位采集到的目标为同一车辆。11.根据权利要求9所述的方法,其中,所述确定两次在预设位置的同一车位采集到的目标是否为同一车辆,包括:对于第一次在预设位置采集到的视频中的第一目标,获取所述第一目标在第二视频采集设备采集的视频中对应的目标的第一目标标识;对于第二次在预设位置采集到的视频中的第二目标,获取所述第二目标在第二视频采集设备采集的视频中对应的目标的第二目标标识;将所述第一目标标识与所述第二目标标识进行比对;若所述第一目标标识和所述第二目标标识不匹配,则确定所述第一目标和所述第二目标的车辆相似度;若所述车辆相似度超过相似度阈值,则确定两次在预设位置的同一车位采集到的目标为同一车辆。12.一种目标跟踪装置,包括:获取模块,用于获取第一视频采集设备采集的第一视频,确定所述第一视频中的目标车辆的车辆信息;第一确定模块,用于基于预先确定的位置变换信息和所述车辆信息,确定所述目标车辆在第二视频采集设备采集的第二视频中对应的跟踪目标;第二确定模块,用于将所述车辆信息与所述跟踪目标建立关联关系,根据所述关联关系,确定所述目标车辆的停车信息;其中,所述第一视频采集设备的采集范围与所述第二视频采集设备的采集范围有交集。
13.根据权利要求12所述的装置,还包括第三确定模块,用于:在所述第一视频采集设备采集的视频中的车位对应的区域中确定多个第一关键点的位置;根据所述车位的车位标识和所述多个第一关键点各自的位置,在所述第二视频采集设备采集的视频中,确定所述多个第一关键点各自对应的第二关键点的位置;根据所述多个第一关键点的位置和各自对应的第二关键点的位置,确定所述位置变换信息。14.根据权利要求12或13所述的装置,其中,所述获取模块,用于:获取第一视频采集设备采集的第一视频,若目标车辆在所述第一视频中出现的次数超过预设阈值,且所述目标车辆在所述第一视频中的位置满足预设位置条件,则确定所述第一视频中的目标车辆的车辆信息。15.根据权利要求12或13所述的装置,其中,所述第一确定模块,用于:基于预先获取的位置变换信息、所述车辆信息中的车辆位置和行驶信息,确定所述目标车辆在第二视频采集设备采集的第二视频中的预测位置;基于所述预测位置和所述第二视频中的多个目标的位置,确定所述目标车辆在所述第二视频中对应的跟踪目标。16.根据权利要求15所述的装置,其中,所述第一确定模块,用于:在所述预测位置和所述第二视频中的多个目标的位置相匹配的情况下,确定所述目标车辆与匹配的多个目标之间的目标相似度;基于所述目标相似度,确定所述目标车辆在所述第二视频中对应的跟踪目标。17.根据权利要求12或13所述的装置,其中,所述第二确定模块,用于:基于所述跟踪目标在所述第二视频中的行驶状态,确定所述跟踪目标对应的停车开始时刻和停车结束时刻;根据所述关联关系、所述停车开始时刻和停车结束时刻,确定所述目标车辆的停车信息。18.根据权利要求12或13所述的装置,还包括比对模块,用于:在所述跟踪目标已关联车辆信息的情况下,将已关联车辆信息对应的车辆和所述跟踪目标的相似度,与所述目标车辆和所述跟踪目标的相似度进行比对,根据比对结果,确定是否更新所述跟踪目标关联的车辆信息。19.根据权利要求12或13所述的装置,还包括控制模块,用于:在所述第二视频中的任一车辆满足预设条件的情况下,生成转动控制指令,控制所述第一视频采集设备从预设位置转动到目标位置采集第三视频;在所述第三视频采集完成后,控制所述第一视频采集设备转回所述预设位置。20.根据权利要求19所述的装置,还包括第四确定模块,用于:确定两次在预设位置的同一车位采集到的目标是否为同一车辆,如果是,则在确定所述车辆的停车结束时刻后,生成所述车辆对应的停车信息。21.根据权利要求20所述的装置,其中,所述第四确定模块具体用于:对于第一次在预设位置采集到的视频中的第一目标,获取所述第一目标在第二视频采集设备采集的视频中对应的目标的第一目标标识;
对于第二次在预设位置采集到的视频中的第二目标,获取所述第二目标在第二视频采集设备采集的视频中对应的目标的第二目标标识;将所述第一目标标识与所述第二目标标识进行比对;若所述第一目标标识和所述第二目标标识匹配,则确定两次在预设位置的同一车位采集到的目标为同一车辆。22.根据权利要求20所述的装置,其中,所述第四确定模块具体用于:对于第一次在预设位置采集到的视频中的第一目标,获取所述第一目标在第二视频采集设备采集的视频中对应的目标的第一目标标识;对于第二次在预设位置采集到的视频中的第二目标,获取所述第二目标在第二视频采集设备采集的视频中对应的目标的第二目标标识;将所述第一目标标识与所述第二目标标识进行比对;若所述第一目标标识和所述第二目标标识不匹配,则确定所述第一目标和所述第二目标的车辆相似度;若所述车辆相似度超过相似度阈值,则确定两次在预设位置的同一车位采集到的目标为同一车辆。23.一种电子设备,其特征在于,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-11中任一项所述的方法。24.一种存储有计算机指令的非瞬时计算机可读存储介质,其特征在于,所述计算机指令用于使计算机执行权利要求1-11中任一项所述的方法。25.一种计算机程序产品,包括计算机程序,该计算机程序在被处理器执行时实现根据权利要求1-11中任一项所述的方法。
技术总结
本公开提供了一种目标跟踪方法、装置、电子设备及存储介质,涉及智能交通技术领域。方法包括:获取第一视频采集设备采集的第一视频,确定第一视频中的目标车辆的车辆信息;基于预先确定的位置变换信息和车辆信息,确定目标车辆在第二视频采集设备采集的第二视频中对应的跟踪目标;将车辆信息与跟踪目标建立关联关系,根据关联关系,确定目标车辆的停车信息。本公开技术方案,可以避免频繁转动第一视频采集设备造成的寿命折损,以及第一视频采集设备转动期间,目标不能连续跟踪造成车位内目标记时不准确的问题,可以提高路内停车系统的稳定性和停车数据的准确性。稳定性和停车数据的准确性。稳定性和停车数据的准确性。
技术研发人员:师小凯 唐俊
受保护的技术使用者:北京精英路通科技有限公司
技术研发日:2021.12.31
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。