1.本实用新型涉及电动推杆控制技术领域,特别涉及一种电动推杆控制电路。
背景技术:
2.电动推杆是一种将电动机的旋转运动转变为推杆的直线往复运动的电力驱动装置。可用于各种简单或复杂的工艺流程中做为执行机械使用,以实现远距离控制、集中控制或自动控制。电动推杆通常包括正转、反转等动作,需要电路进行控制,常规的控制方式采用软件编程进行控制,物料成本和人工成本较高,增加单片机工程师人员编制。
3.因此,现有技术存在缺陷,需要改进。
技术实现要素:
4.本实用新型的主要目的是提出一种电动推杆控制电路,旨在实现电动推杆的纯硬件模拟电路控制,节约成本。
5.为实现上述目的,本实用新型提出的一种电动推杆控制电路,包括用于控制电动推杆工作的控制电路、用于对控制电路进行供电的供电电路、用于进行触控操作的触摸控制电路,所述供电电路的电压输出端与所述控制电路连接,所述控制电路的推杆控制信号输出端与所述电动推杆的控制信号接收端连接,所述触摸控制电路的信号输出端与所述控制电路的信号接收端连接;
6.所述控制电路还包括用于在没有收到控制按键的控制信号后自动断电的上电延时电路、用于控制电动推杆正反转的正反转控制电路、用于对电动推杆行程进行检测的行程到底检测电路、用于对电动推杆进行过流保护的过流保护电路。
7.优选地,所述供电电路包括9~24v电压输入电源,还包括用于将输入电压转换为12v的第一稳压芯片u1、用于将输入电压转换为5v的第二稳压芯片u17。
8.优选地,所述触摸控制电路包括一触摸按键控制芯片u6,还包括用于控制电动推杆开启的open键、用于控制电动推杆正转的up键、用于控制电动推杆反转的down键。
9.优选地,所述上电延时电路包括一运算放大器u8、与所述运算放大器 u8连接的充电电容c14,所述运算放大器u8包括四路运放电路。
10.优选地,所述正反转控制电路包括用于控制电动推杆正转的第一mos管 u2和第二mos管u3,还包括用于控制电动推杆反转的第三mos管u4和第四mos管u5。
11.优选地,所述行程到底检测电路包括采样电流放大电路、推杆启动瞬间迟滞控制电路、推杆行程检测电路,所述采样电流放大电路用于对采样电流进行放大六倍,包括所述运算放大器u8的第三路运放电路构成的跟随器电路、运算放大器u8的第二路运放电路、电阻r100、电阻r101、电阻r102、电阻r103、电阻r104、电容c58,所述跟随器电路包括电阻r109和电容c62;所述推杆启动瞬间迟滞控制电路包括电容c36和二极管d2,所述推杆行程检测电路包括检测控制芯片u9,与所述检测控制芯片u9连接并用于检测电动推杆正转行程的二极管d19、三极管q4、电阻r35、电阻r36,与所述检测控制芯片u9连接并用于检测电动推杆反
转行程的二极管d4、电阻r37、电阻r38。
12.优选地,还包括与所述open键、up键、down键分别对应的led指示灯。
13.与现有技术相比,本实用新型的有益效果是:改善了现有电动推杆的控制方式,采用纯硬件模拟电路控制,电路结构简单,控制操作方便,还带有保护电路,大大节省了材料成本和人工软件开发成本。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
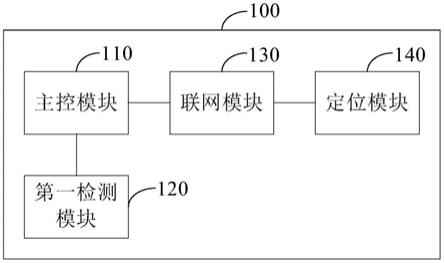
15.图1为本实用新型控制电路原理模块图;
16.图2为本实用新型供电电路原理图;
17.图3为本实用新型推杆启动电路原理图;
18.图4为本实用新型电动推杆正反转控制电路原理图;
19.图5为本实用新型推杆行程检测电路原理图;
20.图6为本实用新型过流保护电路原理图;
21.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
22.本实施例提出的一种电动推杆控制电路,参考图1,包括用于控制电动推杆工作的控制电路、用于对控制电路进行供电的供电电路、用于进行触控操作的触摸控制电路,所述供电电路的电压输出端与所述控制电路连接,所述控制电路的推杆控制信号输出端与所述电动推杆的控制信号接收端连接,所述触摸控制电路的信号输出端与所述控制电路的信号接收端连接;
23.所述控制电路还包括用于在没有收到控制按键的控制信号后自动断电的上电延时电路、用于控制电动推杆正反转的正反转控制电路、用于对电动推杆行程进行检测的行程到底检测电路、用于对电动推杆进行过流保护的过流保护电路。
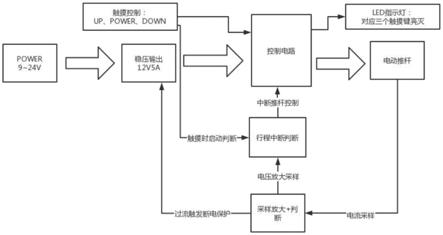
24.进一步地,参考图2,所述供电电路包括9~24v电压输入电源,还包括用于将输入电压转换为12v的第一稳压芯片u1、用于将输入电压转换为5v 的第二稳压芯片u17。第一稳压芯片u1将输入电压输出为12v,供电动推杆驱动,供电受控,第二稳压芯片u17将输入电压稳压输出5v,供电持续不间断。
25.进一步地,所述触摸控制电路包括一触摸按键控制芯片u6,还包括用于控制电动推杆开启的open键、用于控制电动推杆正转的up键、用于控制电动推杆反转的down键。
26.进一步地,所述上电延时电路包括一运算放大器u8、与所述运算放大器u8连接的充电电容c14,所述运算放大器u8包括四路运放电路。
27.进一步地,所述正反转控制电路包括用于控制电动推杆正转的第一mos 管u2和第二mos管u3,还包括用于控制电动推杆反转的第三mos管u4 和第四mos管u5。
28.进一步地,所述行程到底检测电路包括采样电流放大电路、推杆启动瞬间迟滞控
制电路、推杆行程检测电路,所述采样电流放大电路用于对采样电流进行放大六倍,包括所述运算放大器u8的第三路运放电路构成的跟随器电路、运算放大器u8的第二路运放电路、电阻r100、电阻r101、电阻r102、电阻r103、电阻r104、电容c58,所述跟随器电路包括电阻r109和电容c62;所述推杆启动瞬间迟滞控制电路包括电容c36和二极管d2,所述推杆行程检测电路包括检测控制芯片u9,与所述检测控制芯片u9连接并用于检测电动推杆正转行程的二极管d19、三极管q4、电阻r35、电阻r36,与所述检测控制芯片u9连接并用于检测电动推杆反转行程的二极管d4、电阻r37、电阻r38。
29.进一步地,还包括与所述open键、up键、down键分别对应的led 指示灯。
30.具体地,电动推杆启动时,参考图3,触摸open键,触摸按键控制芯片 u6输出0,三极管q6导通给充点电容c14充电,同时运算放大器u8的13 脚(in-4)》12脚(in 4),因此14脚(out4)输出0,三极管q2导供电给第一稳压芯片u1使能,第一稳压芯片u1开始输出 12v电压给电动推杆, open键的指示灯led3亮,说明此时可控制电动推杆正反转,若led3灭则不能进行电动推杆的正反转操作控制。
31.当触摸上电后,手指不再触摸时,由于充点电容c14已充电,维持运算放大器u8的13脚(in-4)》12脚(in 4),直至充点电容c14放电至运算放大器u8的13脚(in-4)《12脚(in 4)后,14脚(out4)输出1,第一稳压芯片u1停止工作,open键指示灯led3灭,此功能用于一段时间没触摸操作后的自动断电,维持供电时间通过调整电容c14和电阻r21的值调节。应当说明的是,当open键的指示灯led3亮的状态下触摸up键或down 键,都能重新延长供电时间,直到无任何操作后的一段时间后断电。
32.参考图4,当进行电动推杆正转操作时,触摸up键,led2灯亮,第一mos管u2和第二mos管u3导通,电动推杆正转,手指离开up键后停止正转;
33.当进行电动推杆反转操作时,触摸down键,led1灯亮,第三mos 管u4和第四mos管u5导通,电动推杆反向上电反转,手指离开down键后停止反转。
34.应当说明的是,电动推杆正常工作电流在2a~3a之间,但在行程到底后,电流会上升至3a~5a之间,因此,根据这个原理,通过电流检测方式判断电动推杆的行程到底,参考图5,具体包括:
35.1、电流采样:推杆正转或反转,电流都会流经电阻r23产生压降,通过运算放大器u8的跟随器vref2配合采样点压值经过放大6倍后给后端参考电压比较判断,具体放大倍数计算公式为:r104
÷
(r102 r103) 1=6。
36.2、推杆启动瞬间迟滞控制:应当说明的是,由于电动推杆的启动瞬间电流较大,此时用电容c36通过二极管d2在电动推杆启动的瞬间拉低过流采样电平,延迟过流采样判断来避开推杆启动瞬间因过流误动导致被判断为过流停止推杆工作。
37.3、推杆行程检测控制:应当说明的是,过流采样电平经过放大六倍后输出至检测控制芯片u9的6脚和9脚,然后分别对电动推杆的正转和反转进行行程判断:
38.电动推杆正转控制行程判断:触摸up键,开始正转,二极管d19导通促使三极管q4导通,给检测控制芯片u9供电,在二极管d19的导通同时,使电阻r35和电阻r36组成的采样电路开始工作供给检测控制芯片u9的比较器2,比较用电平3.25v输入至检测控制芯片u9的5脚(in 2),此时如果推杆正转行程到底后,电流加大,采样电平上升经放大后输入检测控制芯片u9的6脚(in-2),当6脚(in-2)》5脚(in 2)时,7脚(out2)输出 0,三极管q13的栅极电
平为0停止导通,电动推杆停止工作,led2灭,同时,检测控制芯片u9的3脚连通7脚,3脚(in 1)《2脚(in-1),1脚(out1) 输出0,检测控制芯片u9的5脚被拉至0,导致维持检测控制芯片u9的7 脚继续输出0,不受电动推杆到位后的电流减小被再次启动,实现停止电动推杆的工作,此时手指离开触摸,检测控制芯片u9断电,实现初始等待工作状态,知道再有触摸发生再同步检测判断和控制;
39.电动推杆反转控制行程判断:参考上述正转行程控制判断可知,由于 doen键触摸时,二极管d4导通,电阻r37和电阻r38采样工作,而电阻 r35和电阻r36因三极管d19截止不工作,这是由运放的3和4组实现行程判断和控制任务。
40.参考图6,本实施例中的过流保护有2重保障:
41.1、采样电流3a时行程到底停止,此时open键指示灯亮,控制反转有效;
42.2、采样电流5a时,运算放大器u8的9脚(in-3)》10脚(in 3),因此,8脚(out3)输出0,检测控制芯片u9的13脚(int4-)《12脚(int4 ),因此,检测控制芯片u9的14脚(out4)高阻,q2截止,第一稳压芯片u1 使能电压为0,第一稳压芯片u1停止工作,open键指示灯灭,此时触摸up 键和down键电动推杆不工作,up键和down键指示灯也因失去 12v电源,呈现灯灭状态。
43.以上仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。