1.本实用新型涉及培养基分装技术领域,具体为一种自动化细胞培养基用分装装置。
背景技术:
2.培养基是指供给微生物、植物或动物生长繁殖的,由不同营养物质组合配制而成的营养基质。一般都含有碳水化合物、含氮物质、无机盐、维生素和水等几大类物质。培养基既是提供细胞营养和促使细胞增殖的基础物质,也是细胞生长和繁殖的生存环境。培养基种类很多,根据配制原料的来源可分为自然培养基、合成培养基、半合成培养基;培养基配成后一般需测试并调节ph,还须进行灭菌,通常有高温灭菌和过滤灭菌。培养基由于富含营养物质,易被污染或变质。配好后不宜久置,最好现配现用。
3.但是,现有的培养基在生产装配时需要对不同尺寸的培养基进行分类,这类操作大多是由人工配合机械完成,无法实现全自动化的分装操作;因此,不满足现有的需求,对此我们提出了一种自动化细胞培养基用分装装置。
技术实现要素:
4.本实用新型的目的在于提供一种自动化细胞培养基用分装装置,以解决上述背景技术中提出的现有的培养基在生产装配时需要对不同尺寸的培养基进行分类,这类操作大多是由人工配合机械完成,无法实现全自动化的分装操作的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种自动化细胞培养基用分装装置,包括分装基座,所述分装基座的上方设置有分装轴柱,且分装轴柱与分装基座电性连接,所述分装轴柱的外表面设置有分装盘架,且分装盘架有多个,所述分装基座的一端设置有输出摇杆套组,且分装基座的另一端设置有输入摇杆套组,所述输出摇杆套组和输入摇杆套组均包括电源底轴、垂直轨杆和分装摇臂,且电源底轴与垂直轨杆电性连接,所述分装摇臂一端的下方设置有电控夹盘,且电控夹盘与分装摇臂通过螺钉连接,所述分装摇臂与垂直轨杆滑动连接,且电源底轴与分装基座通过螺钉连接。
6.优选的,所述分装盘架的外表面设置有器皿槽,且器皿槽呈圆周分布,所述分装盘架之间的器皿槽的尺寸结构不同。
7.优选的,所述分装盘架的内侧设置有电控轴环,且电控轴环与分装盘架通过螺钉连接,所述分装盘架通过电控轴环与分装轴柱转动连接。
8.优选的,所述分装摇臂的另一端设置有轴承环套,且轴承环套与分装摇臂通过螺钉连接。
9.优选的,所述电控夹盘的内部设置有套夹槽,所述套夹槽的顶部设置有物体传感器,且物体传感器的型号设置为42gtu-9000-qd。
10.优选的,所述套夹槽的四周均设置有扇形夹片,且扇形夹片延伸至套夹槽的内侧,所述扇形夹片与分装摇臂通过滑轨滑动连接。
11.与现有技术相比,本实用新型的有益效果是:
12.1、本实用新型输出摇杆套组和输入摇杆套组的组成结构相同,两组分别安装在分装轴柱的两侧,其中输入摇杆套组负责将不同尺寸的培养基分类排布到对应的分装盘架上方,而输出摇杆套组则是负责将分装盘架上的培养基给抓取移动到指定的产品收集区域,整个过程无需人工干预,有机器完成自动化的分选操作;
13.2、本实用新型的分装摇臂在抓取培养基时将电控夹盘对准培养基的上方,随后控制分装摇臂下降,当培养基进入到套夹槽内侧后扇形夹片延伸而出夹紧培养基,然后通过物体传感器来判断当前夹取的培养尺寸情况,再调节分装摇臂的升降高度到对应的区间进行下一步操作。
附图说明
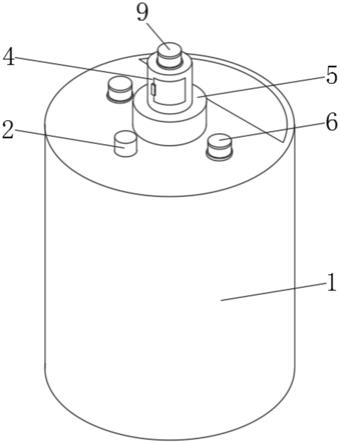
14.图1为本实用新型的整体主视图;
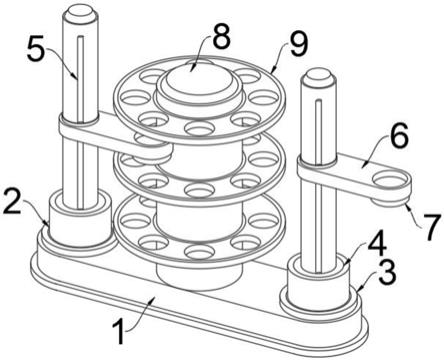
15.图2为本实用新型的分装盘架结构示意图;
16.图3为本实用新型的分装摇臂结构示意图。
17.图中:1、分装基座;2、输出摇杆套组;3、输入摇杆套组;4、电源底轴;5、垂直轨杆;6、分装摇臂;7、电控夹盘;8、分装轴柱;9、分装盘架;10、器皿槽;11、电控轴环;12、轴承环套;13、扇形夹片;14、套夹槽;15、物体传感器。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
19.请参阅图1,本实用新型提供的一种实施例:一种自动化细胞培养基用分装装置,包括分装基座1,分装基座1的上方设置有分装轴柱8,且分装轴柱8与分装基座1电性连接,分装轴柱8的外表面设置有分装盘架9,且分装盘架9有多个,分装基座1的一端设置有输出摇杆套组2,且分装基座1的另一端设置有输入摇杆套组3,输出摇杆套组2和输入摇杆套组3均包括电源底轴4、垂直轨杆5和分装摇臂6,且电源底轴4与垂直轨杆5电性连接,分装摇臂6一端的下方设置有电控夹盘7,且电控夹盘7与分装摇臂6通过螺钉连接,分装摇臂6与垂直轨杆5滑动连接,且电源底轴4与分装基座1通过螺钉连接,输出摇杆套组2和输入摇杆套组3的组成结构相同,两组分别安装在分装轴柱8的两侧,其中输入摇杆套组3负责将不同尺寸的培养基分类排布到对应的分装盘架9上方,而输出摇杆套组2则是负责将分装盘架9上的培养基给抓取移动到指定的产品收集区域,整个过程无需人工干预,有机器完成自动化的分选操作。
20.请参阅图2,分装盘架9的外表面设置有器皿槽10,且器皿槽10呈圆周分布,分装盘架9之间的器皿槽10的尺寸结构不同,每组分装盘架9上的器皿槽10各不相同,便于进行分类,分装盘架9的内侧设置有电控轴环11,且电控轴环11与分装盘架9通过螺钉连接,分装盘架9通过电控轴环11与分装轴柱8转动连接,分装盘架9可以以分装轴柱8为中心进行转动,这样方便搭配多组摇杆套组进行不同方向上的输出或者输入使用。
21.请参阅图3,分装摇臂6的另一端设置有轴承环套12,且轴承环套12与分装摇臂6通
过螺钉连接,电控夹盘7的内部设置有套夹槽14,套夹槽14的顶部设置有物体传感器15,且物体传感器15的型号设置为42gtu-9000-qd,套夹槽14的四周均设置有扇形夹片13,且扇形夹片13延伸至套夹槽14的内侧,扇形夹片13与分装摇臂6通过滑轨滑动连接,分装摇臂6在抓取培养基时将电控夹盘7对准培养基的上方,随后控制分装摇臂6下降,当培养基进入到套夹槽14内侧后扇形夹片13延伸而出夹紧培养基,然后通过物体传感器15来判断当前夹取的培养尺寸情况,再调节分装摇臂6的升降高度到对应的区间进行下一步操作。
22.工作原理:两组分别安装在分装轴柱8的两侧,其中输入摇杆套组3负责将不同尺寸的培养基分类排布到对应的分装盘架9上方,而输出摇杆套组2则是负责将分装盘架9上的培养基给抓取移动到指定的产品收集区域,而输出摇杆套组2和输入摇杆套组3均由电源底轴4、垂直轨杆5和分装摇臂6组成,其中分装摇臂6与垂直轨杆5滑动连接,在分装摇臂6在抓取培养基时将电控夹盘7对准培养基的上方,随后控制分装摇臂6下降,当培养基进入到套夹槽14内侧后扇形夹片13延伸而出夹紧培养基,然后通过物体传感器15来判断当前夹取的培养尺寸情况,再调节分装摇臂6的升降高度到对应的区间进行下一步操作。
23.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。