1.本技术涉及航空相机成像技术领域,特别是涉及一种支持异速像移补偿功 能的航空相机控制器。
背景技术:
2.航空摄影在军事上、科学领域以及国民各部门中获得极其广泛的应用。它 的重要作用在于可在较短时间内提供大量客观的地面素材。航空摄影可应用于 许多领域,例如:摄影地形图,提供地质调查资料,森林资源调查,城市设计 和改建,铁路、公路等交通的勘察,水利工程的修建,农田建设的规划,军用 侦察等等。
3.航空侦察是获取地面信息的主要手段之一。世界发达国家(如美国、英国 等)从二十世纪初开始研制以胶片为信息载体的航空侦察相机。早期的相机焦 距较短、载片量小、画幅窄、地面分辨力低。随着科学技术的发展和军方对航 空侦察相机需求的牵引,二十世纪七十年代,研制出长焦距、大载片量、宽画 幅、地面分辨力高的航空侦察相机,如美国仙童公司八十年代研发的焦距为 1830mm的ka-112a全景式航空侦察相机,美国芝加哥航空公司生产的焦距为 1676mm的ks-146画幅式相机。至二十世纪八十年代,国际先国家胶进片相机已 经发展至相当高的水平。随着技术发展和ccd探测器技术的日益成熟,从二十 世纪八十年代开始,发达国家开始研发ccd实时传输型侦察相机,至今已发展 至很高的水平,如英国文顿公司生产的db-110、8010、8040相机,美国 recon/optical.inc生产的ca-260、ca-261、ca-265、ca-270、ca-295相机等。
4.航空相机倾斜照相时,由于扫描头倾斜时,在单幅地面区域内,近点目标 在像面上的前向像移速度同远点的前向像移速度相比,方向相同,大小不等。 这里的前向像移速度是指目标在扫描镜坐标系中的运动速度在xs(与机体坐标 系x轴同向)轴的分量对应在像面上的像移速度。将这种方向相等,大小不等 的前向像移速度定义为异速像移。相机俯角和相机视场角是异速像移产生的主 要原因,此外,飞机姿态角,如飞机横滚角也会产生异速像移。
5.航空相机完成的工作,都是在相机控制器的统一的指挥下完成的,作为相机 的控制枢纽,以及相机与外部设备交流的中枢,相机控制器是航空相机最关键的 系统之一,然而目前航空相机控制器不具备异速像移补偿功能,因此本技术为 研制新一代航空相机控制器提供了新思路。
技术实现要素:
6.基于此,为解决上述技术问题,本技术在不额外增加系统硬件成本的前提 下,提供了一种能够支持异速像移补偿功能的航空相机控制器。
7.本技术提供一种支持异速像移补偿功能的航空相机控制器,包括:
8.飞机惯导通讯模块,所述飞机惯导通讯模块与飞机惯导系统连接,用于与 所述飞机惯导系统进行双向通讯。
9.飞机座舱通讯控制模块,所述飞机座舱通讯控制模块与上位机控制软件连 接,用于与所述上位机控制软件进行双向通讯。
10.异速像移补偿参数计算模块,所述异速像移补偿参数计算模块与飞机总线 连接,用于采集飞机参数、航空相机参数、探测器参数,并分析、计算异速像 移补偿相关参数,所述异速像移补偿参数计算模块与异速像移时序控制器连接, 将所述相关参数输送给所述异速像移时序控制器。
11.优选的,还包括与所述飞机座舱通讯控制模块连接的相机显示模块、分系 统控制模块、分系统采集模块。
12.所述相机显示模块与上位机显示软件连接,用于采集图像数据,将所述图 像数据传输给所述上位机显示软件并显示;
13.所述分系统控制模块与相机各分系统连接,用于转发所述上位机控制软件 发送的指令,控制所述相机各分系统。
14.所述分系统采集模块与相机各分系统连接,用于采集所述相机各分系统状 态,并通过所述飞机座舱控制通讯模块返回到所述上位机控制软件,将所述相 机各分系统状态显示在软件上供操作人员参考。
15.优选的,所述飞机参数为:飞行速度、飞行高度、倾斜角、半视场角、斜 距;所述航空相机参数为:分辨率、采样频率、相机焦距、曝光时间、成像帧 频;所述探测器参数为:电荷转移效率、行频、靶面大小、像元尺寸,所述异 速像移补偿相关参数为:分块数、像移补偿速度、电荷转移速度。
16.优选的,所述上位机控制软件发送的指令为调光 、调光-、调焦 、调焦-、 电源开、电源关、存储开、存储关;所述相机各分系统状态为:分系统调光状态、 分系统调焦状态、分系统电源状态、分系统存储容量。
17.优选的,所述上位机控制软件和所述上位机显示软件由vs2010软件开发。
18.优选的,所述相机各分系统包括调光分系统、调焦分系统、电源分系统、 存储分系统。
19.优选的,所述航空相机控制器为单片机开发,模块化设计。
20.优选的,所述飞机惯导通讯模块与所述飞机惯导系统通过rs422双向通讯。
21.优选的,所述飞机座舱通讯控制模块与所述上位机控制软件通过rs422双 向通讯。
22.优选的,所述飞机总线为can总线。
23.本技术的有益效果:本技术的支持异速像移补偿功能的航空相机控制器, 包括飞机惯导通讯模块,所述飞机惯导通讯模块与飞机惯导系统连接,用于与 所述飞机惯导系统进行双向通讯,飞机座舱通讯控制模块,所述飞机座舱通讯 控制模块与上位机控制软件连接,用于与所述上位机控制软件进行双向通讯, 异速像移补偿参数计算模块,所述异速像移补偿参数计算模块与飞机总线连接, 用于采集飞机、航空相机、探测器参数,并分析、计算异速像移补偿相关参数, 所述异速像移补偿参数计算模块与异速像移时序控制器相连,将所述相关参数 输送给异速像移时序控制器,本技术的航空相机控制器可针对异速像移进行参 数计算,实现了异速像移补偿功能。
附图说明
24.图1为本技术实施例提供的异速像移形成示意图;
25.图2为本技术实施例提供的靶面示意图;
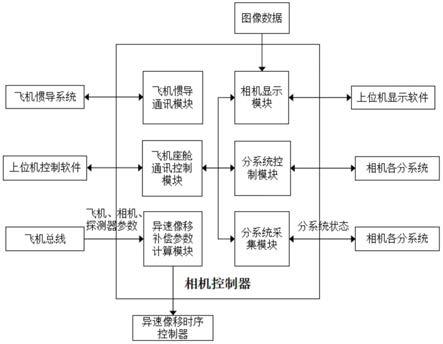
26.图3为本技术实施例提供的支持异速像移补偿功能的航空相机控制器组成 示意图。
具体实施方式
27.为了便于理解本技术,下面将参照相关附图对本技术进行更全面的描述。 附图中给出了本技术的较佳实施例。但是,本技术可以以许多不同的形式来实 现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本 申请的公开内容的理解更加透彻全面。
28.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一 个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元 件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
29.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术 领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术 语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
30.异速像移产生的原因:
31.在侦察过程中,侦察机为躲避敌方雷达的监视,需要做高速低空飞行。高 速低空飞行大大提高飞机自身的战场生存能力和纵深侦察监视能力,但这时航 空成像的靶面上会出现严重像移,导致航空成像模糊,影响航空侦察的效果。
32.飞机在前向飞行中,由于飞机自身的姿态调整(如侧身飞行)或航空相机镜 头俯仰角度的调整,使得航空相机处于图1所示的斜视工作状态。在靶面上的 示意图如图2所示,面阵ccd相机倾斜照相时,由于飞机倾斜时,在单幅地面 区域内,近点目标在像面上的前向像移速度同远点的前向像移速度相比,方向 相同,大小不等。将这种方向相等,大小不等的前向像移速度定义为异速像移。
33.实施例1:
34.本技术选用philips公司的p89lv51rd2单片机作为相机控制器。 p89lv51rd2是一款具有64kbflash程序rom,1kb数据ram的8位单片机,其 最大的特点是支持2倍速(
×
2mode)、在系统编程(isp,in-systemprogramming)和在运用中编程(iap,in-application programming)功能。当 单片机工作在
×
2模式时,机器周期降为普通模式的一半,这样在外接晶振频 率不变的情况下,可以得到2倍的吞吐量。这一特性的最大好处是:在保持单 片机性能不变的情况下使频率降低一半,从而降低电磁干扰;isp功能使得用 户可以通过单片机的串口重新烧写单片机的程序代码,而不必将器件从电路板 取下,这一特性使得烧写和升级固件程序变得非常方便;iap功能使得用户可 以在单片机运行过程中通过中断程序实时改写单片机flash程序rom中的数 据,而不必对所有程序代码进行重新烧写,这一特性使得更改程序中的某些固 定数据变得非常方便。
35.本技术实施例提供的一种支持异速像移补偿功能的航空相机控制器,请参 阅图3,包括:
36.飞机惯导通讯模块,所述飞机惯导通讯模块与飞机惯导系统连接,用于与 所述飞机惯导系统通过rs422进行双向通讯;负责采集飞机惯导系统的状态, 主要采集飞机的高度、速度、温度、姿态角等参数,同时向所述飞机惯导系统 发送指令。
37.飞机座舱通讯控制模块,所述飞机座舱通讯控制模块与上位机控制软件连 接,用于与所述上位机控制软件通过rs422进行双向通讯;主要为相机和上位 机pc提供串行通信接口,接收上位机发送过来的数据帧,并进行校验。
38.异速像移补偿参数计算模块,所述异速像移补偿参数计算模块与飞机can 总线连接,用于采集飞机、航空相机、探测器参数,并分析、计算异速像移补 偿相关参数,将所述相关参数输送给异速像移时序控制器。所述异速像移时序 控制器由fpga开发,模块化设计。所述飞机参数有:飞行速度、飞行高度、倾 斜角、半视场角、斜距;所述航空相机参数有:分辨率、采样频率、相机焦距、 曝光时间、成像帧频;所述探测器参数:电荷转移效率、行频、靶面大小、像 元尺寸、分块数量。同时分析、计算异速像移补偿相关参数,所述异速像移补 偿相关参数为:分块数、像移补偿速度、电荷转移速度。所述异速像移补偿参 数计算模块与异速像移时序控制器相连,将参数传输给异速像移时序控制器, 实现异速像移补偿功能。
39.所述支持异速像移补偿功能的航空相机控制器还包括与所述飞机座舱通讯 控制模块连接的相机显示模块、分系统控制模块、分系统采集模块,
40.所述相机显示模块与所述上位机显示软件连接,用于采集图像数据,将所 述图像数据传输给所述上位机显示软件并显示,所述上位机显示软件利用 vs2010进行开发。
41.所述分系统控制模块与相机各分系统连接,用于转发所述上位机控制软件 发送的指令,控制所述相机各分系统;所述相机各分系统为调光分系统,调焦 分系统,电源分系统,存储分系统,所述上位机控制软件发送指令,通过分系 统控制模块执行的操作主要有:调光 、调光-、调焦 、调焦-、电源开、电源 关、存储开、存储关。
42.所述分系统采集模块与相机各分系统连接,用于采集所述相机各分系统状 态,并通过所述飞机座舱控制通讯模块返回到所述上位机控制软件,将分系统 状态显示在软件上供操作人员参考。分系统状态主要有:分分系统调光状态、 分系统调焦状态、分系统电源状态、分系统存储容量。
43.本技术的支持异速像移补偿功能的航空相机控制器的工作流程,具体如下:
44.步骤1:飞机惯导通讯模块通过rs422与飞机惯导系统进行通讯,给飞机惯 导系统发送指令,采集飞机惯导系统状态,进行保存。
45.步骤2:操作手通过上位机控制软件发送指令,通过飞机座舱控制通讯模块 转发至分系统控制模块,发送指令控制相机各分系统,相机各分系统执行指令 操作。
46.步骤3:分系统采集模块采集相机各分系统状态,通过飞机座舱控制通讯模 块将相机各分系统状态及故障显示到上位机显控软件,供操作员参考。
47.步骤4:相机显示模块采集图像数据,将图像数据输入到上位机显示软件并 显示,供操作员参考。
48.步骤5:异速像移补偿参数计算模块通过飞机can总线采集飞机、相机、探 测器参数,通过计算异速像移相关参数,将参数传输给异速像移时序控制器。
49.请参阅图1,整个阵列中,飞机飞行方向上焦平面的像移速率并不是不变的。 它是由倾斜的范围和斜距r(即镜头到地面景物对应点的距离)决定的。范围越 大,焦平面处像
移速率越小。具体地,在垂直飞行方向上,某点p2处的像移速 率前像像移v
p2
为:
50.其中,ε是视场角的一半,δ是相机的俯角,f是镜头焦距;v是飞机飞行 速度;r是斜距,即镜头到与焦平面对应地面的点的距离。如图1所示,焦平面 阵列fpa在几何学上可被进一步做如下描述:
51.这里,对于任意一个给定的θ,y是在垂直于飞行方向上所拍摄地面区域的 某点距中心线的距离。如下所示:
[0052][0053]
其中,δ是俯角,即视场中心与水平线间的夹角;h是飞机的高度。
[0054]
因此:
[0055]
直于焦平面方向的像移对于图像质量的影响可以由计算焦平面阵列像移调 制传递函数mtf得出。由(4)式,对于给定的镜头焦距f、俯角δ、视场角ε和 飞机的速高比v/h,在垂直于焦平面方向上,图像某点x处的速度v
x
可表示为:
[0056][0057]
经计算与分析可知异步像速只与相机的横向视角和倾斜角有关,与飞机的 纵向视角无关。
[0058]
分块选取计算原理分析:依据像移补偿精度要求通过公式将面阵ccd的若 干列像素划分通过公式计算出合适的分块数与像移补偿速度。其原理如图3所 示。
[0059]
镜头横向的俯仰角度为δ,镜头的焦距为f,镜头半视场角为θ,地面远景点 速度为地面近景点在ccd阵面上的n点处的像移速度为: 近、远景点间像移速度比值当ε取固定值时 vn/vf值随俯仰角δ的减小而增大,当δ变动范围在[90
°
,θ)时,vn/vf的取值 范围[1, ∞),这说明镜头的横向俯仰角度对地面远近物点在ccd面上对应像点的 像移速度差值影响很大,随着δ的减小像移速度差异已经无法近似忽略。
[0060]
将ccd的像面分成如图3所示的相等的块,每块的宽度为其中d为分的 块数。
[0061]
前向像移的速度只与纵向视场角有关,与横向视场角无关,像面上视场角 点n处的像移速度为:
[0062][0063]
本技术实施例提供的一种航空相机控制器,可实现异速像移补偿功能,对 异速像
移补偿参数计算,确定任务参数,控制航空相机运动,显示相机采集图 像,采集航空相机各分系统状态,与飞机惯导系统进行通讯功能。
[0064]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述 实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特 征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0065]
以上实施例仅表达了本技术的优选的实施方式,其描述较为具体和详细, 但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的 普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改 进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权 利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。