1.本技术涉及养护车的领域,尤其是涉及小区绿化养护装置。
背景技术:
2.目前小区的绿化要求越来越高,小区的绿化形式多为绿化带以及草坪,其中对于绿化带的修剪是小区绿化养护的一项重要内容。传统的绿化修剪,由作业人员手持绿篱机人工修剪,工作效率较低。
3.相关技术中,公告号为cn207167129u的中国实用新型专利公开了一种车载式绿篱修剪机,包括承载车、修剪机,所述的修剪机包括底盘、立臂、配重、横臂、修剪马达和剪切刀架组合、刀头油缸、横臂支撑油缸,底盘与承载车后部连接,底盘内设有液压泵站和液压控制总成,立臂与底盘连接,横臂与立臂铰接,横臂支撑油缸底座与立臂连接,横臂与横臂支撑油缸的活塞外端铰接,横臂的一端与配重连接,横臂的另一端设有连接件,所述连接件与剪切刀架组合中部铰接,刀头油缸的一端与横臂的端部铰接、另一端与剪切刀架组合的上壳体铰接,内横臂与收缩油缸连接;剪切刀架组合中的修剪马达与剪切刀架连接,刀头油缸、收缩油缸、横臂支撑油缸分别与液压泵站和液压控制总成相连,承载车驾驶室内设有控制台和监视屏。
4.针对上述中的相关技术,发明人认为剪切刀架单次工作只能修剪绿化带的一侧,并且只能修剪绿化带的顶部或者侧边,对于小区中某些绿化带而言,绿化带的两侧以及顶端均需要修剪,故如果想要将此绿化带修剪完成,则上述车载式绿篱修剪机需要往返多次,存在有工作效率较低的缺陷。
技术实现要素:
5.为了一次性完成修剪作业,提高工作效率,本技术提供小区绿化养护装置。
6.本技术提供的小区绿化养护装置采用如下的技术方案:
7.小区绿化养护装置,包括承载车以及设置于所述承载车上的修剪装置,所述修剪装置包括转动组件、驱动组件以及平整机构,所述平整机构包括安装组件以及刀架组件,所述安装组件包括顶板以及铰接于所述顶板两侧的侧板,所述刀架组件包括安装于所述顶板上的顶面刀架、安装于所述侧板上的侧面刀架、设置于所述顶板上用于驱动所述顶面刀架的第一电机、设置于所述侧板上用于驱动所述侧面刀架上的第二电机。
8.通过采用上述技术方案,操作人员通过启动第一电机,第一电机驱动顶面刀架对绿化带的顶面进行修剪,操作人员通过启动第二电机,第二电机确定侧面刀架对绿化带的侧面进行修剪,养护装置单次作业即可完成对绿化带的全部修剪工作,有利于提高工作效率。
9.优选的,所述顶板上设置有支撑组件,所述支撑组件包括固定于所述顶板上的定位柱、设置于所述定位柱的电动推缸,所述电动推缸一端与所述定位柱铰接,所述电动推缸另一端与所述侧板铰接。
10.通过采用上述技术方案,当绿化带的侧面并非竖直设置时,定位柱和电动推缸的设置方便操作人员控制侧板的倾斜程度,使得侧板能够贴合不同形状的绿化带,方便侧面刀架对绿化带进行修剪。
11.优选的,所述侧板上的侧面刀架设置有两个,所述侧面刀架与所述侧板在侧板的长度方向上滑移配合,所述侧板上设置有用于固定所述侧面刀架的限位组件。
12.通过采用上述技术方案,当绿化带的高度超出侧板的长度时,操作人员可以向远离顶板的方向移动单个侧面刀架,从而增到侧面刀架的修剪范围。
13.优选的,所述侧面上开设有多个螺纹孔,所述螺纹孔沿所述侧板的长度方向均匀布置,所述限位组件包括用于固定所述侧面刀架上的固定板、设置于所述固定板上的定位螺栓,所述定位螺栓穿过所述固定板并与所述螺纹孔螺纹配合。
14.通过采用上述技术方案,固定板和定位螺栓的设置方便操作人员固定移动后的侧面刀架,螺纹孔的设置方便操作人员控制侧面刀架位于侧板上的位置。
15.优选的,所述顶板上开设有限位槽,所述限位槽的长度方向与所述顶板的长度方向一致,所述顶板上设置有调节组件,所述调节组件包括设置于所述顶板上的转轮、穿设于所述顶板上并与所述转轮固定连接的蜗杆、设置于所述顶板内并与所述蜗杆螺纹传动的蜗轮、设置于所述限位槽内并与所述蜗轮固定连接的转动杆,所述转动杆两端螺纹相反,所述转动杆两端上套设有限位块,所述限位块设置于所述限位槽内,所述限位块与所述转动杆螺纹配合,所述侧板与所述限位块铰接。
16.通过采用上述技术方案,限位槽的设置有利于限制限位块的转动,使得限位块沿限位槽的长度方向滑动,操作人员通过旋转转轮,转轮转动带动蜗杆转动、蜗杆转动带动蜗轮转动,蜗轮转动使得转动杆转动,转动杆转动使得限位块相互靠近或者相互远离,有利于操作人员控制两个侧板之间的距离。
17.优选的,所述驱动组件包括设置于所述承载车上的主动臂、设置于所述主动臂内并与所述主动臂滑移配合的从动臂、固定于所述主动臂内的第一气缸,所述第一气缸的活塞杆与所述从动臂固定连接,所述平整机构设置于所述从动臂上。
18.通过采用上述技术方案,操作人员启动第一气缸,第一气缸的活塞杆移动使得从动臂移动,操作人员通过第一气缸控制从动臂的伸出长度,有利于提高平整机构的修剪范围。
19.优选的,所述转动组件包括固定于所述承载车上的伺服电机、固定于所述伺服电机输出轴上的主动齿轮、转动安装于所述承载车上并与所述主动齿轮啮合的从动齿轮、固定于所述从动齿轮上的支撑柱,所述支撑柱与所述主动臂铰接。
20.通过采用上述技术方案,操作人员启动伺服电机,伺服电机的输出轴转动带动主动齿轮转动,主动齿轮转动带动从动齿轮转动,从动齿轮转动使得支撑柱转动,支撑柱转动能使得操作人员能够调整平整机构的朝向。
21.优选的,所述支撑柱上设置有第二气缸,所述第二气缸一端与所述支撑柱铰接,所述第二气缸另一端与所述主动臂铰接。
22.通过采用上述技术方案,第二气缸的设置有利于控制主动臂的抬升角度,从而控制平整机构的高度。
23.优选的,所述承载车上设置有警示灯。
24.通过采用上述技术方案,警示灯的设置有利于提醒路人和过往车辆注意安全。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.操作人员通过启动第一电机,第一电机驱动顶面刀架对绿化带的顶面进行修剪,操作人员通过启动第二电机,第二电机确定侧面刀架对绿化带的侧面进行修剪,养护装置单次作业即可完成对绿化带的全部修剪工作,有利于提高工作效率;
27.定位柱和电动推缸的设置方便操作人员控制侧板的倾斜程度,使得侧板能够贴合不同形状的绿化带,方便侧面刀架对绿化带进行修剪;
28.调节组件的设置有利于操作人员控制两个侧板之间的距离。
附图说明
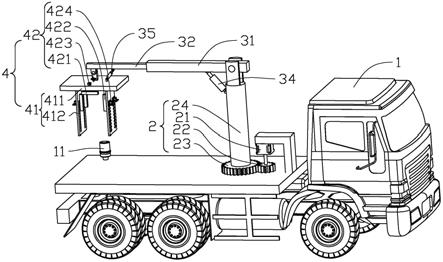
29.图1是本技术实施例的小区绿化养护装置的结构结构示意图。
30.图2是本技术实施例的主动臂的内部结构示意图。
31.图3是本技术实施例的平整机构的内部结构示意图。
32.附图标记说明:1、承载车;11、警示灯;2、转动组件;21、伺服电机;22、主动齿轮;23、从动齿轮;24、支撑柱;3、驱动组件;31、主动臂;32、从动臂;33、第一气缸;34、第二气缸;35、第三气缸;4、平整机构;41、安装组件;411、顶板;4111、限位槽;412、侧板;4121、螺纹孔;4122、滑槽;413、限位块;42、刀架组件;421、顶面刀架;422、侧面刀架;423、第一电机;424、第二电机;5、安装台;6、限位组件;61、固定板;62、定位螺栓;7、调节组件;71、转轮;72、蜗杆;73、蜗轮;74、转动杆;8、支撑组件;81、定位柱;82、电动推缸。
具体实施方式
33.以下结合附图1
‑
3对本技术作进一步详细说明。
34.本技术实施例公开小区绿化养护装置。参照图1、图2,小区绿化养护装置包括承载车1、转动组件2、驱动组件3以及平整机构4,承载车1上固定有警示灯11,警示灯11的设置提醒行人和过往的车辆注意安全。
35.参照图1、图2,转动组件2包括伺服电机21、主动齿轮22、从动齿轮23以及支撑柱24。伺服电机21固定于承载车1上,主动齿轮22套设于伺服电机21的输出轴上,且主动齿轮22与伺服电机21的输出轴固定连接。从动齿轮23转动安装于承载车1上,从动齿轮23与主动齿轮22相互啮合。支撑柱24为圆柱状,支撑柱24竖直设置,支撑柱24的底面与从动齿轮23固定连接,且支撑柱24的轴线与从动齿轮23的轴线重合。
36.参照图1、图2,驱动组件3包括主动臂31、从动臂32以及第一气缸33,主动臂31的横截面的矩形,主动臂31一端铰接于支撑柱24上,主动臂31另一端内部中空。主动臂31与支撑柱24之间设置有第二气缸34,第二气缸34远离活塞杆的一端与支撑柱24铰接,第二气缸34的活塞杆与主动臂31铰接。从动臂32的横截面为矩形,从动臂32设置于主动臂31内,且从动臂32与主动臂31滑移配合。第一气缸33设置于主动臂31与从动臂32之间,第一气缸33远离活塞杆的一端与主动臂31的内顶面固定连接,第一气缸33的活塞杆与从动臂32固定连接。
37.参照图1、图3,平整机构4包括安装组件41以及刀架组件42,安装组件41包括顶板411以及侧板412。顶板411为矩形板状,顶板411的中部铰接于从动臂32远离主动臂31的一端,侧板412为矩形板状,侧板412设置于顶板411的两侧,且侧板412铰接于顶板411的底面
上。顶板411与从动臂32之间设置有第三气缸35,第三气缸35一端与从动臂32铰接,第三气缸35另一端与顶板411铰接。刀架组件42包括顶面刀架421、侧面刀架422、第一电机423以及第二电机424,第一电机423固定于顶板411的上表面,第一电机423的输出轴穿过顶板411,顶面刀架421套设于第一电机423的输出轴上,第一电机423驱动顶面刀架421内的刀片转动。
38.参照图1、图3,侧板412上开设有螺纹孔4121,螺纹孔4121开口为圆形,螺纹孔4121设置有多个,多个螺纹孔4121沿侧板412的长度方向均匀布置。侧板412上开设有滑槽4122,滑槽4122开口为矩形,滑槽4122的长度方向与侧板412的长度方向一致,单个侧板412上的滑槽4122设置有两个,两个滑槽4122对称设置。第二电机424通过安装台5与侧板412连接,安装台5为矩形板状,安装台5与侧板412相抵,且安装台5与侧板412相互靠近的侧面滑移配合。安装台5上设置有限位组件6,限位组件6包括固定板61与定位螺栓62,固定板61的横截面为矩形,固定板61的底面与安装台5的上表面固定连接,固定板61和侧板412相互靠近的侧面贴合并相抵。定位螺栓62穿设于固定板61上,且定位螺栓62与螺纹孔4121螺纹配合。第二电机424固定于安装台5上,第二电机424的输出轴穿过滑槽4122,侧面刀架422套设于第二电机424的输出轴上,第二电机424驱动侧面刀架422内的刀片转动。
39.参照图1、图3,调节组件7包括转轮71、蜗杆72、蜗轮73、转动杆74。顶板411的底面上开设有限位槽4111,限位槽4111开口为矩形,限位槽4111的长度方向与顶板411的长度方向一致。转动杆74的横截面为圆形,转动杆74设置于限位槽4111内,转动杆74的长度方向与限位槽4111的长度方向一致,且转动杆74两端分别与限位槽4111两端的内侧面转动连接。蜗轮73套设于转动杆74的中部,且蜗轮73与转动杆74固定连接,蜗杆72穿设于顶板411内,且蜗杆72与蜗轮73螺纹传动,转轮71设置于顶板411上,转轮71与蜗杆72延伸出顶板411的端部固定连接。转动杆74的两端套设有限位块413,转动杆74两端的螺纹方向不同,限位块413与转动杆74螺纹连接,限位块413的横截面为矩形,限位块413设置于限位槽4111内,限位块413与限位槽4111滑移配合,且侧板412与限位块413铰接。
40.参照图1、图2,顶板411上设置有支撑组件8,支撑组件8包括定位柱81以及电动推缸82,定位柱81为圆柱体,定位柱81竖直设置,定位柱81的顶面与顶板411的底面固定了连接。电动推缸82远离活塞杆的一端与定位柱81铰接,电动推缸82活塞杆与侧板412铰接。支撑组件8的设置有利于操作人员控制侧板412的倾斜角度,使得侧面刀架422贴合绿化带的侧边。
41.本技术实施例小区绿化养护装置的实施原理为:操作人员通过转动组件2控制平整机构4的朝向,操作人员通过第一气缸33调节平整机构4的修剪范围,操作人员通过第二气缸34控制平整机构4的高度,操作人员利用调节组件7控制侧板412之间的距离,支撑组件8的设置有利于操作人员控制侧板412的倾斜程度。操作人员通过启动第一电机423,第一电机423驱动顶面刀架421对绿化带的顶面进行修剪,操作人员通过启动第二电机424,第二电机424驱动侧面刀架422对绿化带的侧面进行修剪,养护装置单次作业即可完成对绿化带的全部修剪工作,有利于提高工作效率。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

