技术特征:
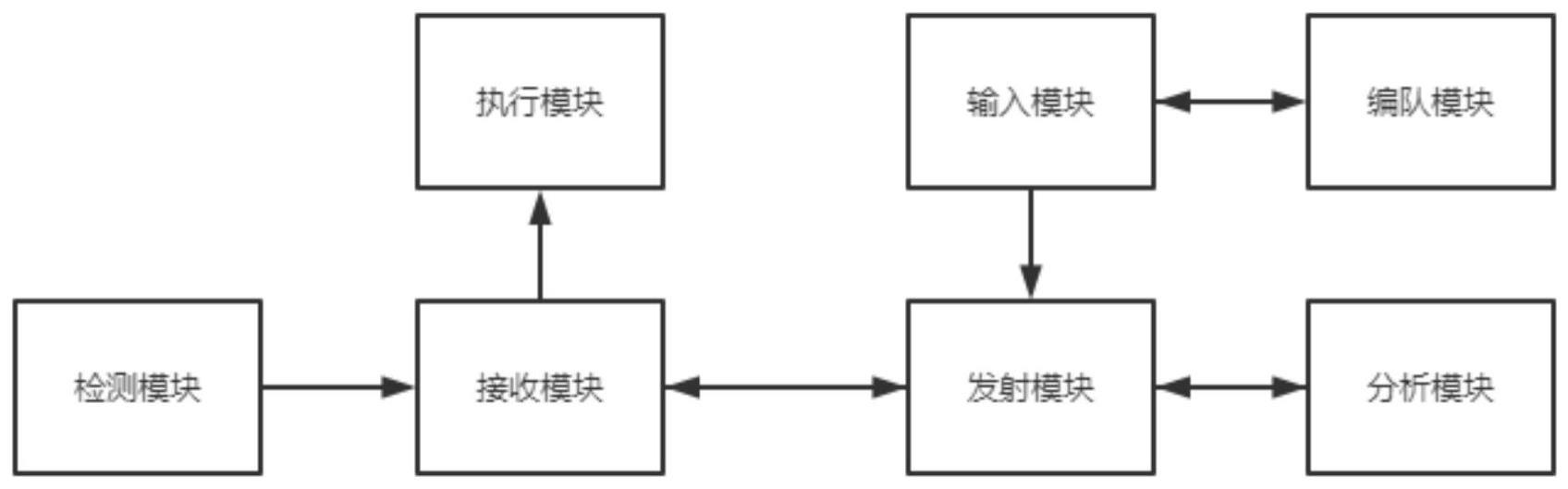
1.一种远程遥控无人舰艇航向容错控制系统,其特征在于,包括执行模块、接收模块、检测模块、发射模块、分析模块、输入模块和编队模块;所述执行模块、所述接收模块和所述检测模块安装于无人舰艇,所述接收模块用于接收指令信息,所述执行模块根据指令信息对无人舰艇的转向进行控制,所述检测模块用于检测无人舰艇的航行状态信息;所述发射模块、所述分析模块、所述输入模块和所述编队模块安装于指挥控制中心,所述发射模块用于发射指令信息,所述输入模块用于输入目标信息,所述分析模块基于所述目标信息和无人舰艇的航行状态计算得到指令参数,所述编队模块用于记录无人舰艇的通讯身份信息;所述分析模块设置容错区域,根据无人舰艇的实时航行状态数据计算出横移率和偏角率,所述分析模块基于横移率、偏角率计算出无人舰艇的容错指数,当容错指数小于阈值时,所述分析模块再计算出转向角,所述执行模块基于所述转向角对无人舰艇进行航向调整。2.如权利要求1所述的一种远程遥控无人舰艇航向容错控制系统,其特征在于,所述检测模块检测的航行状态信息包括无人舰艇的坐标、无人舰艇的实时航向角度、无人舰艇的航速。3.如权利要求2所述的一种远程遥控无人舰艇航向容错控制系统,其特征在于,所述分析模块包括数据存储单元和计算处理单元,所述存储单元用于保存接收的检测信息,所述计算处理单元用于执行计算任务。4.如权利要求3所述的一种远程遥控无人舰艇航向容错控制系统,其特征在于,所述容错指数pw的计算公式为:其中,t
now
表示当前时刻,l表示无人舰艇与目标地点之间的距离,v为无人舰艇的航速,dft为容错距离,d(t
now
)为当前时刻无人舰艇与容错区域航道轴线的距离,θ(t
now
)为当前时刻无人舰艇航向与容错区域航道轴线的夹角,α为横移率,β为偏角率。5.如权利要求4所述的一种远程遥控无人舰艇航向容错控制系统,其特征在于,所述横移率α的计算公式为:所述偏角率β的计算公式为:其中,[t1,t2]为横移率和偏角率对应的时间段,θ(t)表示无人舰艇与航道轴线夹角与时间的函数关系。
6.一种远程遥控无人舰艇航向容错控制方法,其特征在于,包括如下步骤:s101、无人舰艇实时上传航行数据;s102、根据航行数据计算出横移率和偏角率;s103、计算出容错指数;s104、根据容错指数判断是否需要调整航向,若是,则计算出调转向角,若否,则跳回步骤s102;s105、根据转向角调整航向,清空航行数据后跳回步骤s102。
技术总结
本发明提供了一种远程遥控无人舰艇航向容错控制系统,包括执行模块、接收模块、检测模块、发射模块、分析模块、输入模块和编队模块,所述接收模块用于接收指令信息,所述执行模块根据指令信息对无人舰艇的转向进行控制,所述检测模块用于检测无人舰艇的航行状态信息,所述发射模块用于发射指令信息,所述输入模块用于输入目标信息,所述分析模块基于所述目标信息和无人舰艇的航行状态计算得到指令参数,所述编队模块用于记录无人舰艇的通讯身份信息;本系统的分析模块能够对无人机的航行数据进行分析,在其容易脱离容错区域时对航向进行调整,降低了调整的频次,使航行更加顺畅。使航行更加顺畅。使航行更加顺畅。
技术研发人员:袁思鸣 杜度 毛柳伟 陈科 杨坤 韩胡莎
受保护的技术使用者:中国人民解放军92578部队
技术研发日:2023.07.31
技术公布日:2023/10/24
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。