技术特征:
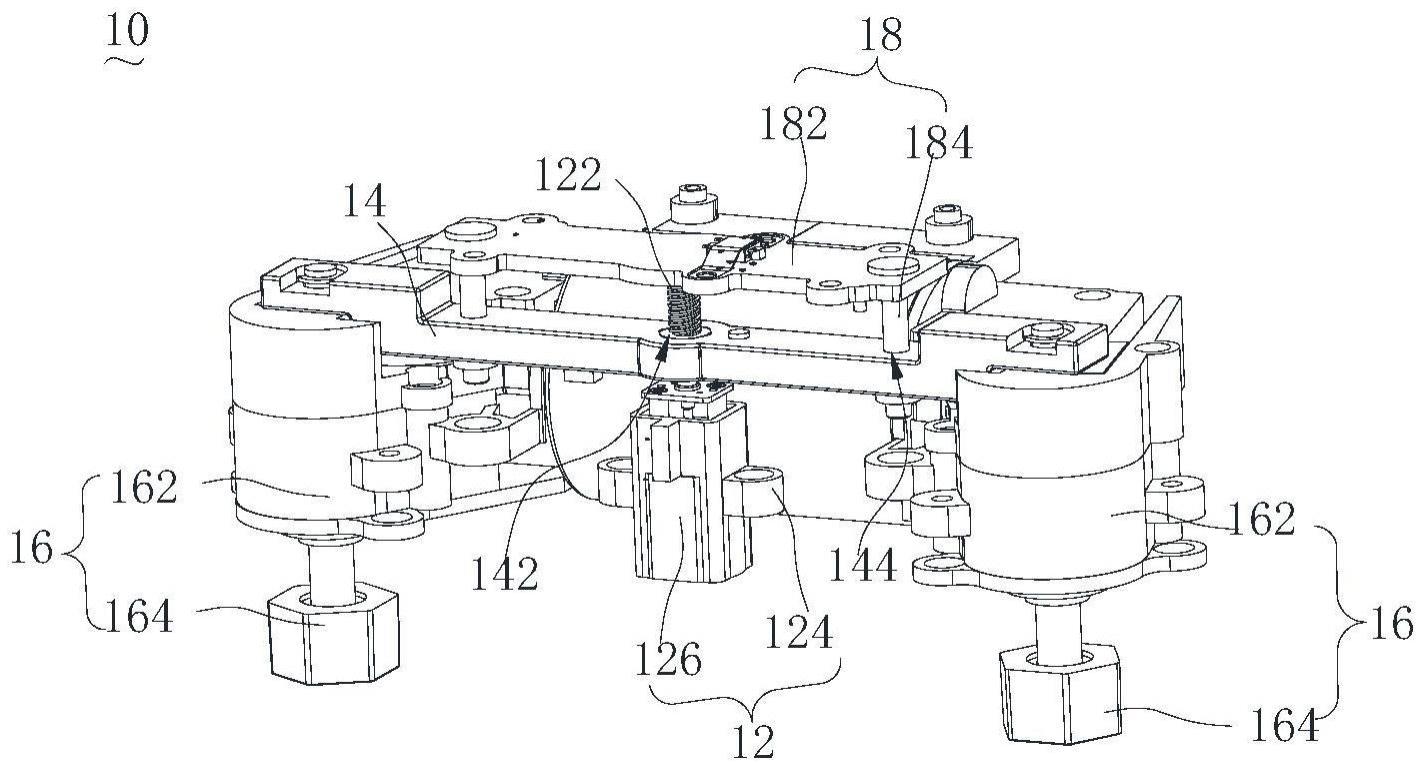
1.一种清洁结构,用于拖地机器人,其特征在于,所述清洁结构包括:驱动组件,设置于所述拖地机器人内,并包括驱动件;联动件,所述联动件活动套设于驱动件上;拖布组件,与所述联动件连接,用于清洁地面;所述驱动件能够向所述联动件施加作用力以拖动所述拖布组件沿与地面垂直方向运动。2.根据权利要求1所述的清洁结构,其特征在于,所述驱动组件还包括驱动电机,所述驱动电机与所述驱动件连接,所述驱动电机用于驱动所述驱动件运动以带动所述联动件沿与地面垂直方向运动。3.根据权利要求2所述的清洁结构,其特征在于,所述驱动组件还包括设置于所述驱动电机的安装件,所述驱动组件通过所述安装件与所述拖地机器人连接。4.根据权利要求1所述的清洁结构,其特征在于,所述清洁结构还包括:限位组件,包括安装板和限位杆,所述安装板位于所述联动件远离所述驱动组件的一侧并与所述拖地机器人连接,所述限位杆自所述安装板沿与地面垂直方向延伸并穿设所述联动件。5.根据权利要求1所述的清洁结构,其特征在于,所述驱动件为丝杆。6.根据权利要求1所述的清洁结构,其特征在于,所述拖布组件包括多个,多个所述拖布组件对称分布在所述驱动组件的两侧。7.根据权利要求6所述的清洁结构,其特征在于,所述拖布组件包括主体部和拖板,所述主体部的一端连接所述联动件,所述另一端连接所述拖板,所述拖板用于清洁地面。8.一种拖地机器人,其特征在于,包括权利要求1至7任一项所述的清洁结构。9.一种控制方法,用于如权利要求8所述的拖地机器人,其特征在于,所述控制方法包括:获取所述拖地机器人的完成清扫命令或回站命令;根据所述完成清扫命令或所述回站命令生成控制指令;根据所述控制指令控制所述驱动件驱动所述联动件带动所述拖布组件沿垂直方向运动以使所述拖布组件脱离地面。10.如权利要求9所述的控制方法,其特征在于,所述控制方法还包括:获取扫地机器人的出站命令;根据所述出站命令生成控制指令;根据所述控制指令控制所述驱动件驱动所述联动件带动所述拖布组件沿垂直方向运动以使所述拖布组件脱离基站。
技术总结
本申请公开了一种清洁结构、拖地机器人以及控制方法。清洁结构包括驱动组件、联动件和拖布组件。驱动组件设置于拖地机器人上,驱动组件包括有驱动件,联动件活动套设于驱动件上,联动件活动套设于驱动件上,拖布组件与联动件连接,用于清洁地面;驱动件能够向联动件施加作用力以拖动拖布组件沿与地面垂直方向运动。本申请的清洁结构通过联动件活动套设于驱动件上,从而驱动件可以向联动件施加作用力从而拖动拖布组件沿与地面垂直方向运动。如此,可以在拖地机器人处于回站或出站时,让拖布组件沿与地面垂直方向运动而脱离地面,避免了拖布组件直接地面或基站摩擦而损坏拖布组件或地面。件或地面。件或地面。
技术研发人员:张哲 蒋育江 徐良通
受保护的技术使用者:美智纵横科技有限责任公司
技术研发日:2022.03.08
技术公布日:2023/9/20
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。