1.本实用新型属于清洗机器人领域,具体涉及一种行走导向结构。
背景技术:
2.目前玻璃幕墙清洗的清洗方式主要为人工清洗,玻璃幕墙的范围一般较大,人工清洗劳动强度大,效率低下,并且危险系数高。随着幕墙清洗的需求越来越大,为解决人工清洗问题,国内外也涌现出了许多类型的幕墙清洗机器人。
3.现有的一种高楼幕墙清洗机器人通过行走装置带动行走,行走装置主要通过链条传动带动行走撑脚运动实现行走,但行走装置在行走过程中,行走撑脚运动产生的冲击力容易导致行走撑脚的运动轨迹发生变化,从而导致行走装置行走装置行走不平稳,影响清洗机器人的正常工作。
技术实现要素:
4.本实用新型的目的在于提供一种行走导向结构,该行走导向结构能使行走装置行走更加平稳,保证清洗机器人的正常工作。
5.其技术方案如下:
6.行走导向结构,包括支撑主架及第一导向板,所述支撑主架包括第二导向板,所述第一导向板设于所述第二导向板的上方,所述第一导向板靠近所述第二导向板的一侧设有第一导向轨,所述第二导向板上设有与所述第一导向轨对应的第二导向轨,所述第一导向轨与所述第二导向轨之间间隔设置。
7.在其中一个实施例中,所述第一导向轨设于所述第一导向板的边缘处,所述第二导向轨设于所述第二导向板的边缘处。
8.在其中一个实施例中,还包括第三导向板,所述支撑主架还包括第四导向板,所述第三导向板位于所述第四导向板的下方,所述第三导向板靠近所述第四导向板的一侧设有第三导向轨,所述第四导向板上设有与所述第三导向轨对应的第四导向轨,所述第三导向轨与所述第四导向轨之间间隔设置。
9.在其中一个实施例中,所述第三导向轨设于所述第三导向板的边缘处,所述第四导向轨设于所述第四导向板的边缘处。
10.在其中一个实施例中,还包括传动机构及行走撑脚,所述传动机构设于所述第二导向板与所述第四导向板之间,所述传动机构与所述行走撑脚连接,所述行走撑脚上设有第一滑轮及第二滑轮,所述第一滑轮位于所述第一导向轨与所述第二导向轨之间,所述第二滑轮位于所述第三导向轨与所述第四导向轨之间。
11.在其中一个实施例中,所述行走撑脚上包括安装连接板、驱动机构及撑脚组件,所述驱动机构固定于所述安装连接板上,所述撑脚组件与所述驱动机构连接,所述安装连接板远离驱动机构的一侧与所述传动机构连接,所述第一滑轮与所述第二滑轮设于所述安装连接板靠近所述传动机构的一侧上。
12.在其中一个实施例中,所述安装连接板靠近所述传动机构的一侧上固定有第一轴承及第二轴承,所述第一滑轮与所述第一轴承连接,所述第二滑轮与所述第二轴承连接。
13.在其中一个实施例中,所述第一滑轮与所述第二滑轮上下对应设置。
14.在其中一个实施例中,所述第一导向板上设有安装孔,所述安装孔位于所述第一导向板的中部。
15.本实用新型所提供的行走导向结构,通过设置第一导向板及第二导向板,并且在两个导向板上对应设置导向轨,使得行走撑脚能沿导向轨的导向方向移动;同时,上下设置两个导向板,可以避免因行走撑脚产生的冲击力使行走撑脚脱轨,导致行走撑脚的运动轨迹发生变化,从而使得行走装置行走更加平稳,保证清洗机器人的正常工作。
附图说明
16.此处的附图,示出了本实用新型所述技术方案的具体实例,并与具体实施方式构成说明书的一部分,用于解释本实用新型的技术方案、原理及效果。
17.除非特别说明或另有定义,不同附图中,相同的附图标记代表相同或相似的技术特征,对于相同或相似的技术特征,也可能会采用不同的附图标记进行表示。
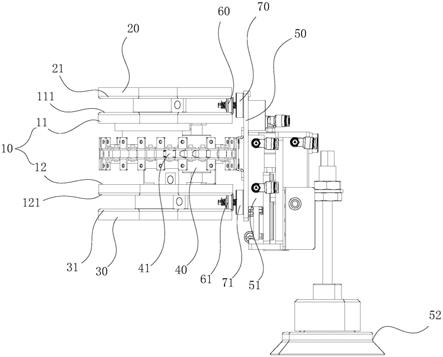
18.图1是本实用新型实施例行走导向结构的结构示意图。
19.图2是本实用新型实施例行走导向结构的俯视图。
20.附图标记说明:
21.10、支撑主架;11、第二导向板;111、第二导向轨;12、第四导向板;121、第四导向轨;20、第一导向板;21、第一导向轨;30、第三导向板;31、第三导向轨;40、传动轴;41、传动链条;50、安装连接板;51、驱动机构;52、撑脚组件;60、第一滑轮;61、第二滑轮;70、第一轴承;71、第二轴承;80、安装孔。
具体实施方式
22.为了便于理解本实用新型,下面将参照说明书附图对本实用新型的具体实施例进行更详细的描述。
23.除非特别说明或另有定义,本文所使用的所有技术和科学术语与所属技术领域的技术人员通常理解的含义相同。在结合本实用新型的技术方案以现实的场景的情况下,本文所使用的所有技术和科学术语也可以具有与实现本实用新型的技术方案的目的相对应的含义。
24.除非特别说明或另有定义,本文所使用的“第一、第二
…”
仅仅是用于对名称的区分,不代表具体的数量或顺序。
25.除非特别说明或另有定义,本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
26.需要说明的是,当元件被认为“固定于”另一个元件,它可以是直接固定在另一个元件上,也可以是存在居中的元件;当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件,也可以是同时存在居中元件;当一个元件被认为是“安装在”另一个元件,它可以是直接安装在另一个元件,也可以是同时存在居中元件。当一个元件被认为是“设在”另一个元件,它可以是直接设在另一个元件,也可以是同时存在居中元件。
27.除非特别说明或另有定义,本文所使用的“所述”、“该”为相应位置之前所提及或描述的技术特征或技术内容,该技术特征或技术内容与其所提及的技术特征或技术内容可以是相同的,也可以是相似的。
28.毫无疑义,与本实用新型的目的相违背,或者明显矛盾的技术内容或技术特征,应被排除在外。
29.如图1及图2所示,行走导向结构,包括支撑主架10、第一导向板20及安装有滑轮的行走撑脚,所述支撑主架10包括呈“d”型的第二导向板11,所述第一导向板20设于所述第二导向板11的上方,所述第一导向板20靠近所述第二导向板11的一侧设有第一导向轨21,所述第二导向板11上设有与所述第一导向轨21对应的第二导向轨111,所述第一导向轨21与所述第二导向轨111之间间隔设置,第一导向轨21与第二导向轨111之间的留有间隔用于安装行走撑脚的滑轮。通过设置第一导向板20及第二导向板11,并且在两个导向板上对应设置导向轨,将行走撑脚的滑轮安装在第一导向轨21与第二导向轨111之间,使得行走撑脚能沿导向轨的导向方向移动;同时,上下设置两个导向板,可以避免因行走撑脚产生的冲击力使行走撑脚从两个导向轨之间脱离,导致行走撑脚的运动轨迹发生变化,从而使得行走装置行走更加平稳,保证清洗机器人的正常工作。
30.所述第一导向轨21设于所述第一导向板20的边缘处,所述第二导向轨111设于所述第二导向板11的边缘处。将导向轨设置在导向板的边缘处,可避免行走撑脚影响行走装置其他结构的安装,并保证行走撑脚的顺利工作。
31.在其中一个实施例中,还包括第三导向板30,所述支撑主架10还包括对应设于第二导向板11下方的第四导向板12,所述第三导向板30位于所述第四导向板12的下方,所述第三导向板30靠近所述第四导向板12的一侧设有第三导向轨31,所述第四导向板12上设有与所述第三导向轨31对应的第四导向轨121,所述第三导向轨31与所述第四导向轨121之间间隔设置。由于行走装置的行走撑脚做升降运动,在第四导向板12的下方增设第三导向板30,第三导向板30及第四导向板12上均设置导向轨,并同样在两个导向轨之间留有安装滑轮的空间,可以进一步提高行走装置对行走撑脚运动轨迹的限制,进一步提高行走装置行走的稳定性;同时,可以提高行走装置对行走撑脚的冲击力的承受能力,避免冲击力对行走装置结构造成损坏,利于保护装置。
32.所述第三导向轨31设于所述第三导向板30的边缘处,所述第四导向轨121设于所述第四导向板12的边缘处。同样地,将导向轨设置在导向板的边缘处,可避免行走撑脚影响行走装置其他结构的安装,并保证行走撑脚的顺利工作。
33.在其中一个实施例中,还包括传动机构及多个行走撑脚,传动机构包括电机、传动轴40及传动链条41,所述电机及传动轴40安装于所述第二导向板11与所述第四导向板12之间,且所述传动轴40转动连接于第二导向板11与第四导向板12之间,传动轴40由电机带动旋转,传动轴40与传动链条41连接并带动所述传动链条41回转,且传动链条41与所述行走撑脚连接,所述行走撑脚上设有两个滑轮,其分别为第一滑轮60及第二滑轮61,所述第一滑轮60为上述安装于所述第一导向轨21与所述第二导向轨111之间的滑轮,所述第二滑轮61为上述安装于所述第三导向轨31与所述第四导向轨121之间的滑轮。通过以上设置,多个行走撑脚由传动链条41带动实现移动,且行走撑脚沿指定的导向方向运动,实现行走装置的平稳行走。
34.所述行走撑脚上包括安装连接板50、驱动机构51及撑脚组件52,所述驱动机构51固定于所述安装连接板50上,所述撑脚组件52与所述驱动机构51连接,所述安装连接板50远离驱动机构51的一侧与所述传动机构连接,所述第一滑轮60与所述第二滑轮61设于所述安装连接板50靠近所述传动机构的一侧上。驱动机构51驱动撑脚组件52做升降运动,配合传动机构实现行走装置的行走功能,其中,行走撑脚的冲击力主要由驱动机构51产生。
35.所述安装连接板50靠近所述传动机构的一侧上固定有第一轴承70及第二轴承71,所述第一滑轮60安装于第一轴承70上,所述第二滑轮61安装于所述第二轴承71上。将滑轮安装在轴承上,实现滑轮与行走撑脚之间的转动连接,使得滑轮的转动不影响行走撑脚的正常运动。
36.所述第一滑轮60与所述第二滑轮61上下对应设置。通过将两个滑轮对应设置,可保证两个滑轮同步沿导轨运动,进而保证行走撑脚随传动链条41的正常移动,保证行走装置的正常运动。
37.如图2所示,所述第一导向板20上设有安装孔80,所述安装孔80位于所述第一导向板20的中部。设置安装孔80用于方便行走装置上电路结构及气路结构等的连接,同时能保证导向板边缘处导轨的正常设置,从而保证对行走撑脚的导向效果。
38.本实用新型所提供的行走导向结构,能使行走撑脚能沿该行走导向结构的导向方向移动,使得行走撑脚的运动更加稳定;同时,上下设置两个导向板,可以避免因行走撑脚产生的冲击力使行走撑脚脱轨,导致行走撑脚的运动轨迹发生变化,从而使得行走装置行走更加平稳,保证清洗机器人的正常工作。
39.以上实施例的目的,是对本实用新型的技术方案进行示例性的再现与推导,并以此完整的描述本实用新型的技术方案、目的及效果,其目的是使公众对本实用新型的公开内容的理解更加透彻、全面,并不以此限定本实用新型的保护范围。
40.以上实施例也并非是基于本实用新型的穷尽性列举,在此之外,还可以存在多个未列出的其他实施方式。在不违反本实用新型构思的基础上所作的任何替换与改进,均属本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。